
Arena 4.0: A Comprehensive ROS2 Development and Benchmarking Platform for Human-centric Navigation Using Generative-Model-based Environment Generation, Linh Kästner★, Volodymyir Shcherbyna, Diego Diaz, Huu Giang Nguyen, Maximilian Ho-Kyoung Schreff, Tim Lenz, Jonas Kreutz, Ahmed Martban, Huajian Zeng, Harold Soh★, IEEE International Conference on Robotics and Automation (ICRA)
Links:
Societal issues like declining birth rates and skilled worker shortages make the integration of robotics into social spaces increasingly critical. To ensure safety and effectiveness, navigation approaches must be extensively tested in realistic simulators before deployment into real settings – especially in crowded environments. The Arena platform addresses this challenge with a comprehensive simulation and benchmarking infrastructure for social navigation.

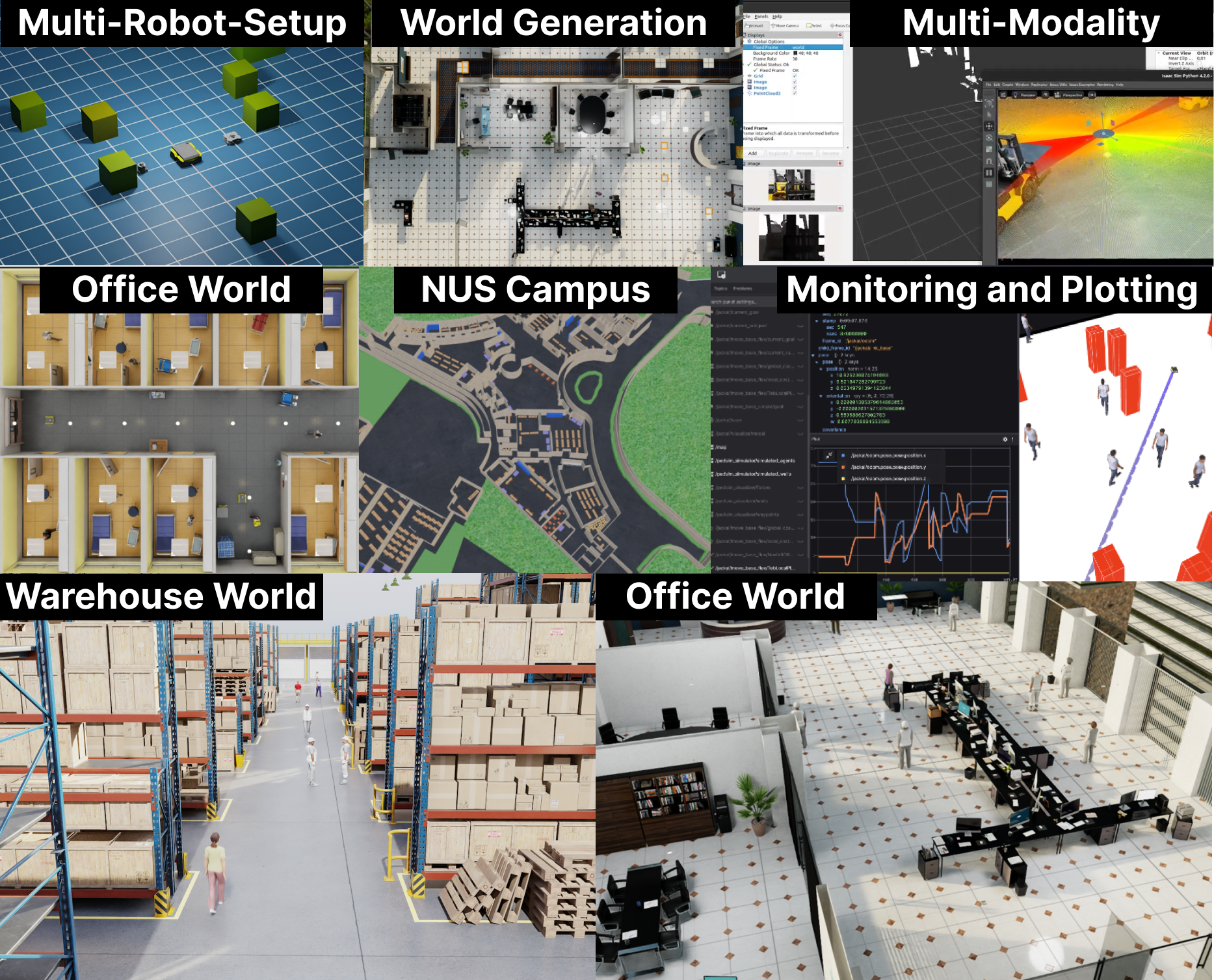
Arena 4.0 features diverse robot kinematics, more than 25 state-of-the-art planners, and enhanced human behavior models, including predictive and generative approaches. A key novelty is the migration to ROS2, enabling modern robotics middleware support. The platform also integrates generative models (LLMs + diffusion) to automatically produce realistic training and evaluation environments (see Figure 1).
Arena 4.0 extends the library of world replicas, including hospitals, industrial warehouses, canteens, offices, and residential environments. Human behavior is modeled more realistically, supporting human–robot and human–object interactions. With the companion Arena-Web application, users can design and test customized social scenarios directly in the browser.
Resources
You can find the paper here.
Check out our repository here on github
Citation
Please consider citing our paper if you build upon our results and ideas.
Contact
Currently, there are a number of exciting projects in collaboration with national and international research and industrial institutions ongoing. If you would like to work with us on one of these projects e.g. for your undergraduate or graduate thesis, please contact us! Basic knowledge in ROS2, Python and/or C++, and interest in robotics are required. If you have questions or comments, please contact Author.

{kind=link}