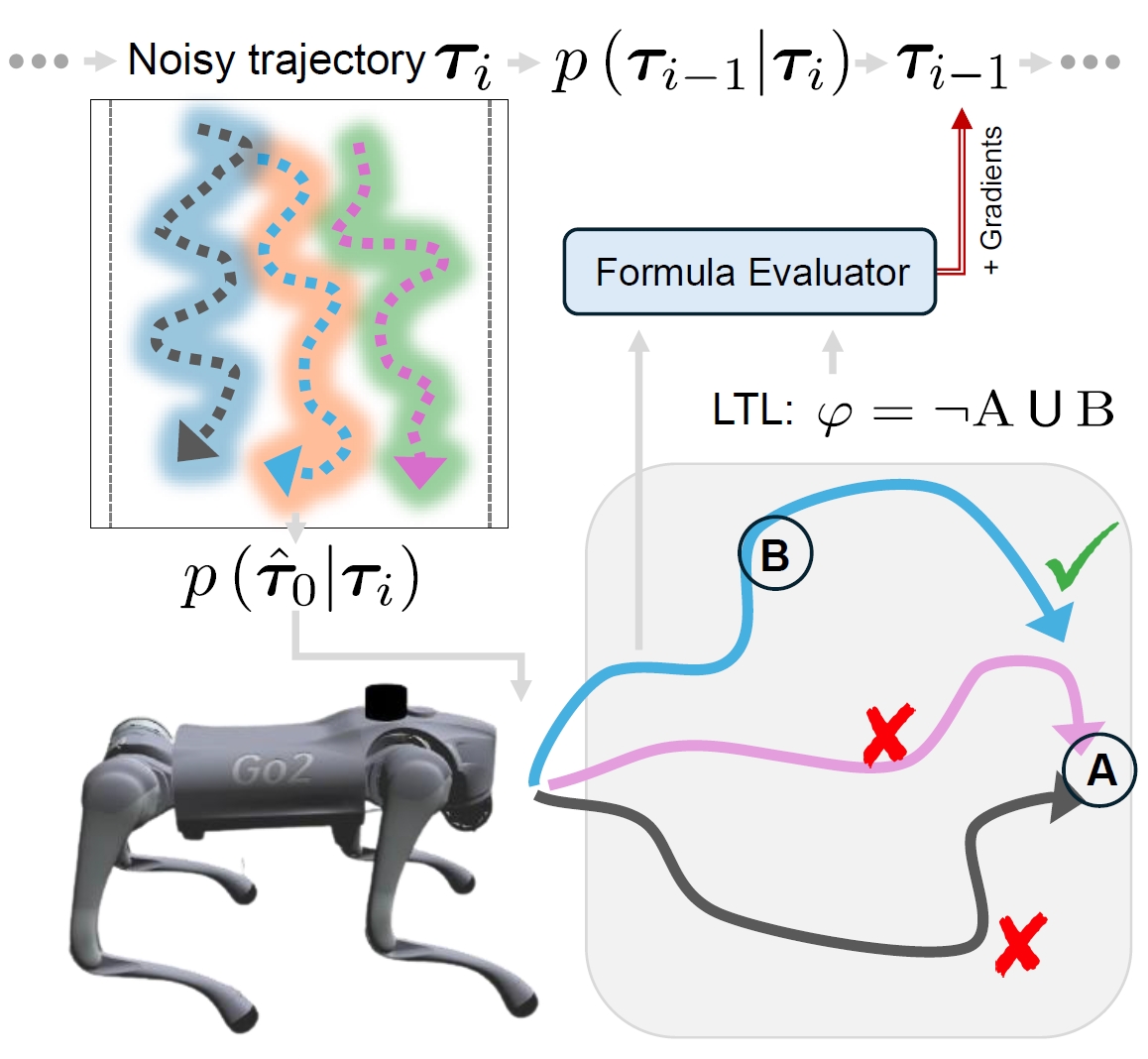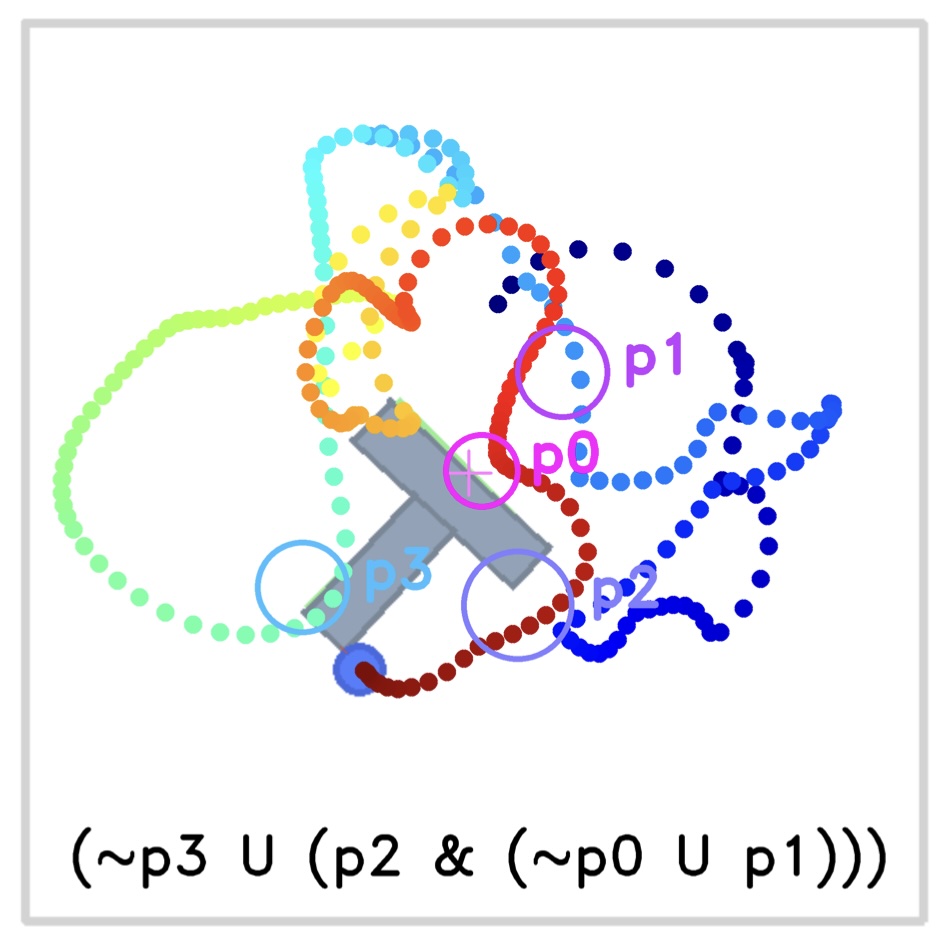
Diffusion Meets Options: Hierarchical Generative Skill Composition for Temporally-Extended Tasks
DOPPLER is a new framework that combines diffusion models and hierarchical reinforcement learning to let robots plan and replan complex, long-horizon tasks from offline data with robustness in the real world.