CLeAR
Home
News
Publications
People
Software & Data
Research
Touch
Trust
Learn
Generate
About Us
Search for Blog
Software & Data
Collaborative Learning and Adaptive Robots (CLeAR) Lab.
social
navigation
RSS
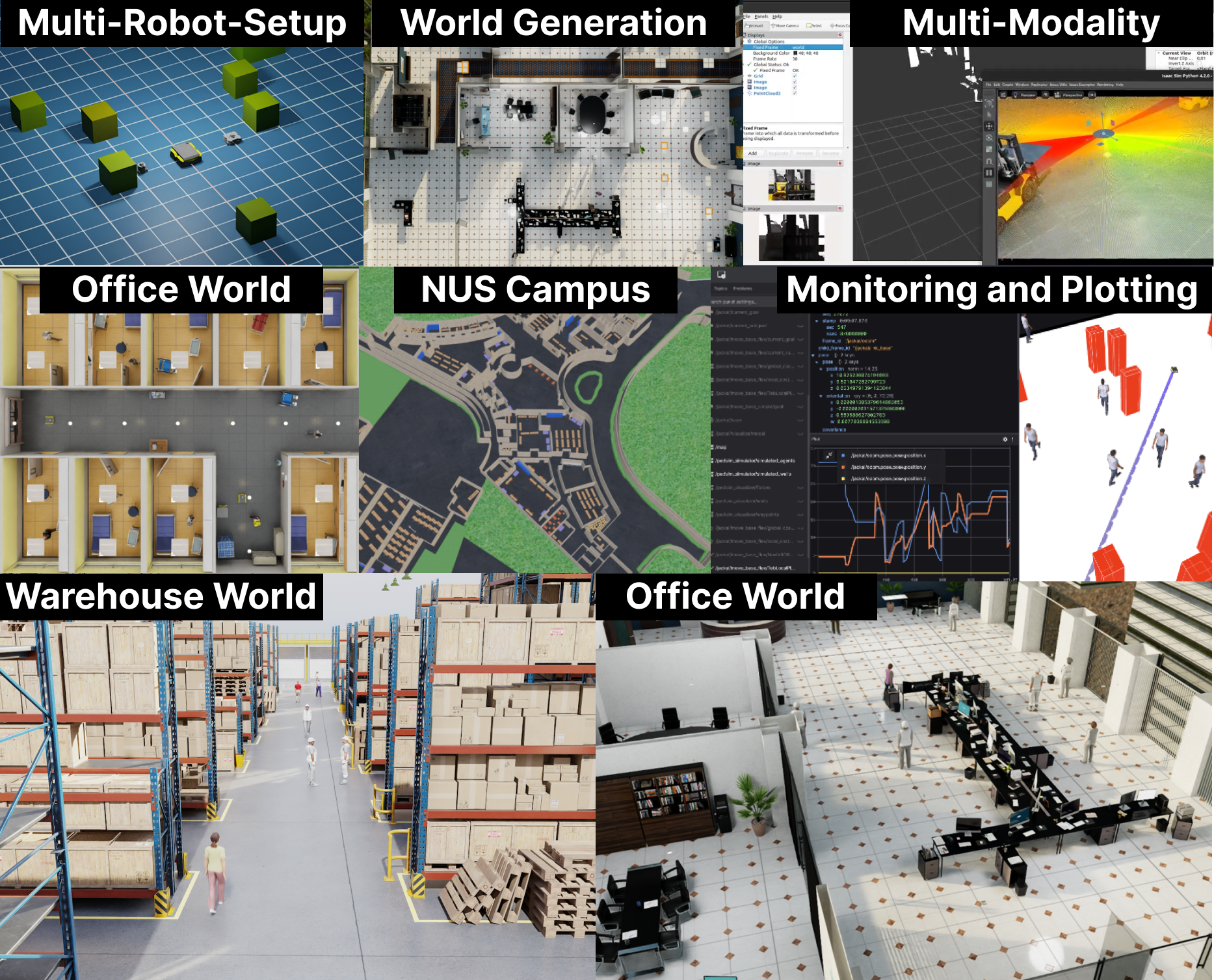
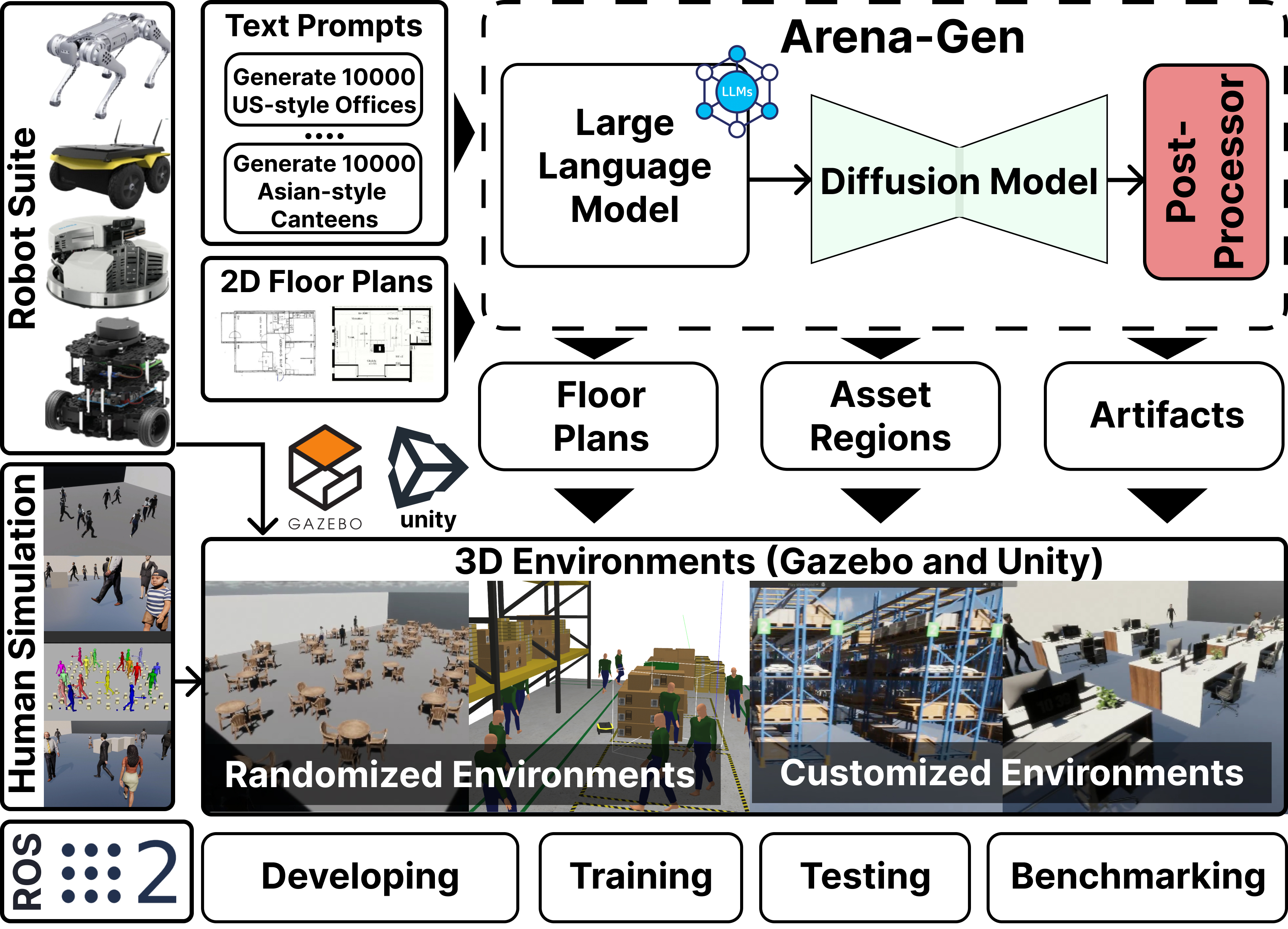
Arena Rosnav - Social Navigation Development Platform
17 Aug 2025
learn
robotics
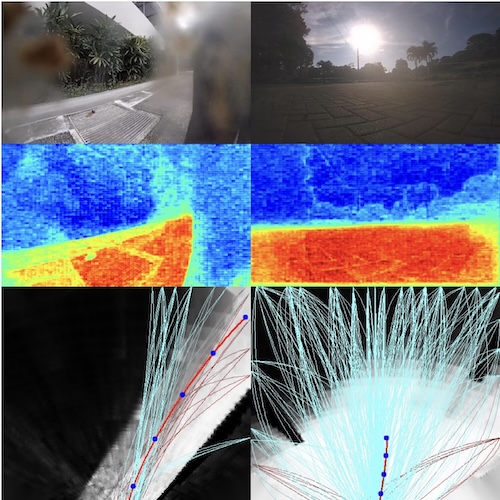
SAM-TP (SAM for Traversability Prediction) - perception core of GeNIE system for pixel-wise traversability prediction.
16 Aug 2025
social
navigation
ICRA
Arena Rosnav - Social Navigation Development Platform
16 Aug 2025
PrePrint
VLA
Tactile Sensing
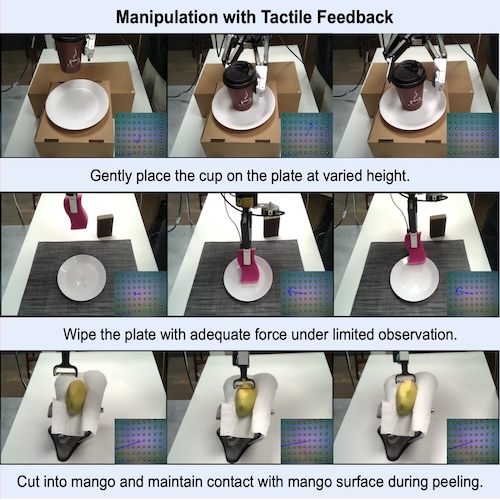
VLA-Touch: Enhancing Vision-Language-Action Models with Dual-Level Tactile Feedback
30 Jul 2025
learn
generative
ICRA
DOPPLER Code and Experiments
01 Jun 2025
generative
NeurIPS
learn
Selective classification with likelihood ratios
21 May 2025
ICRA
Manipulation
Learn from observation
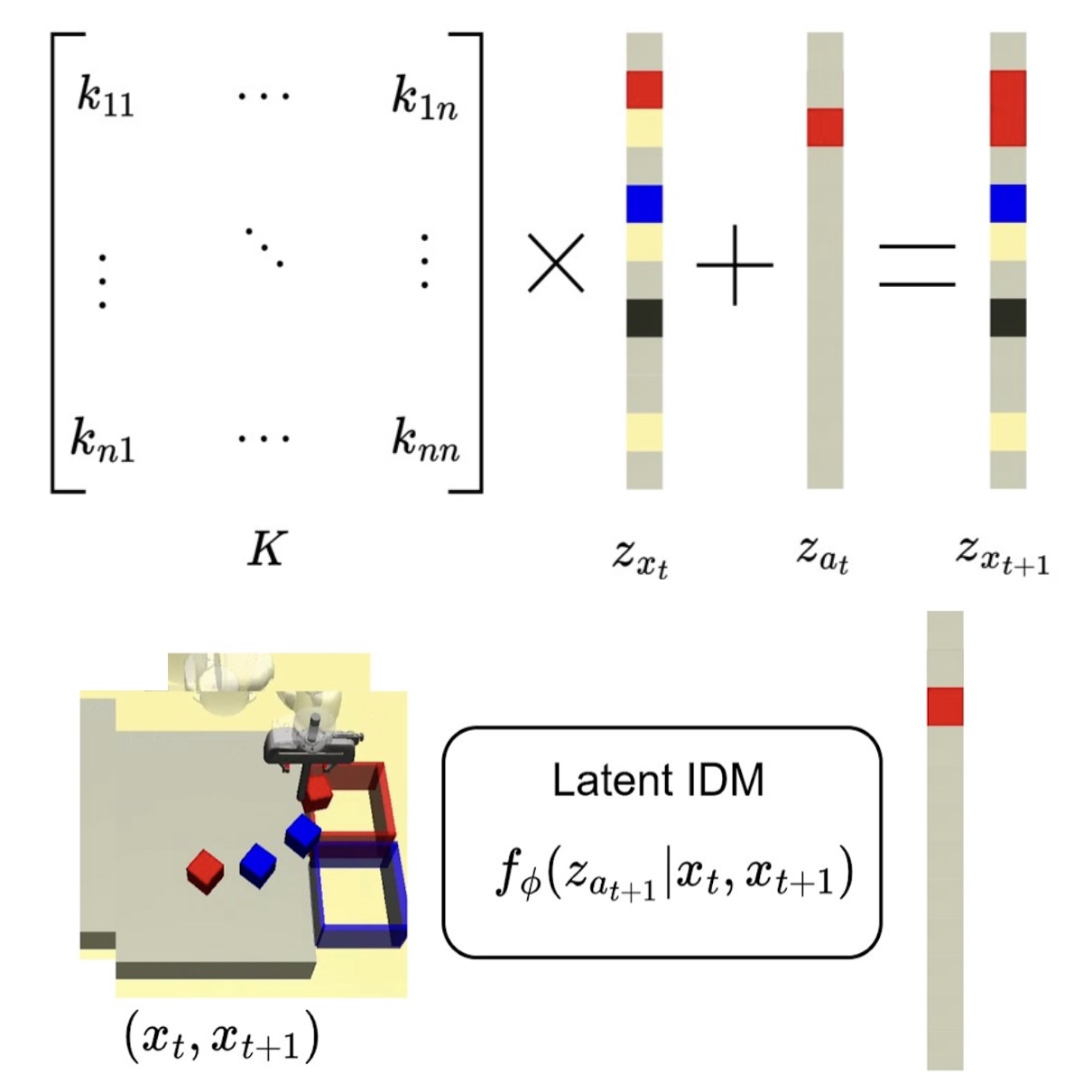
KOAP: Imitation Learning with Limited Actions via Diffusion Planners and Deep Koopman Controllers
30 Jan 2025
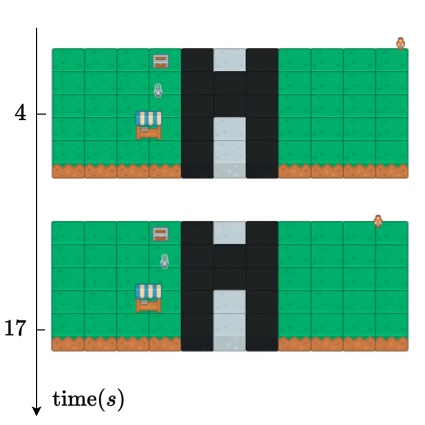
social
simulation
Arxiv
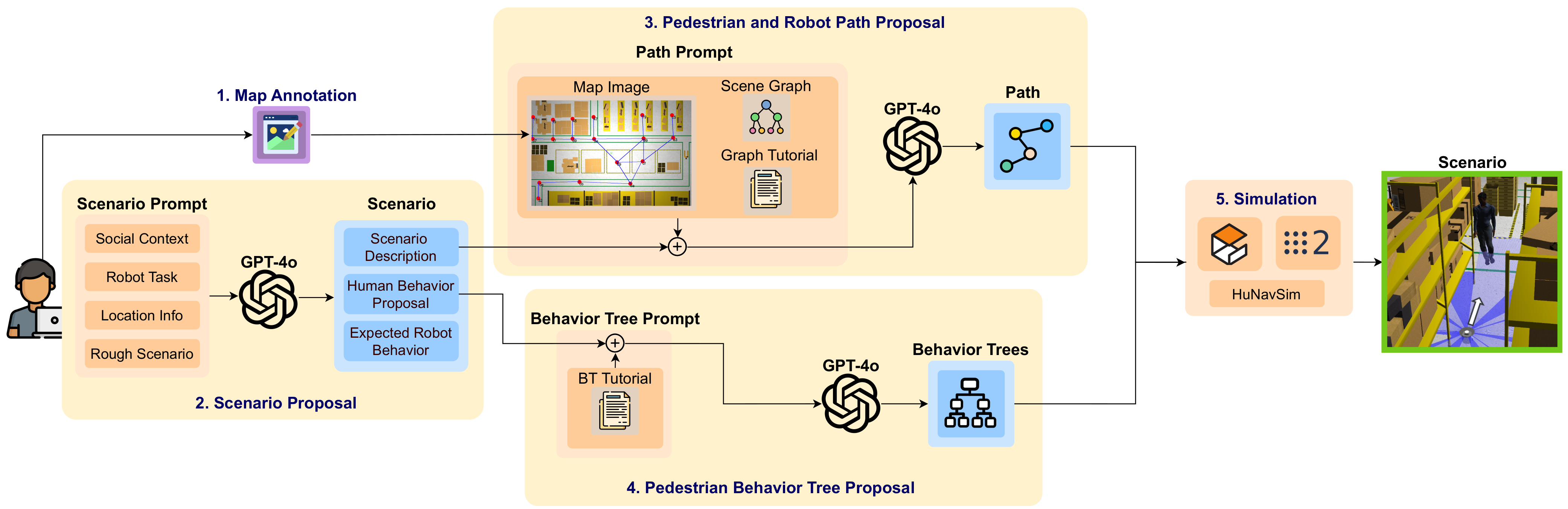
SocRATES codebase
30 Dec 2024
generative
NeurIPS
learn
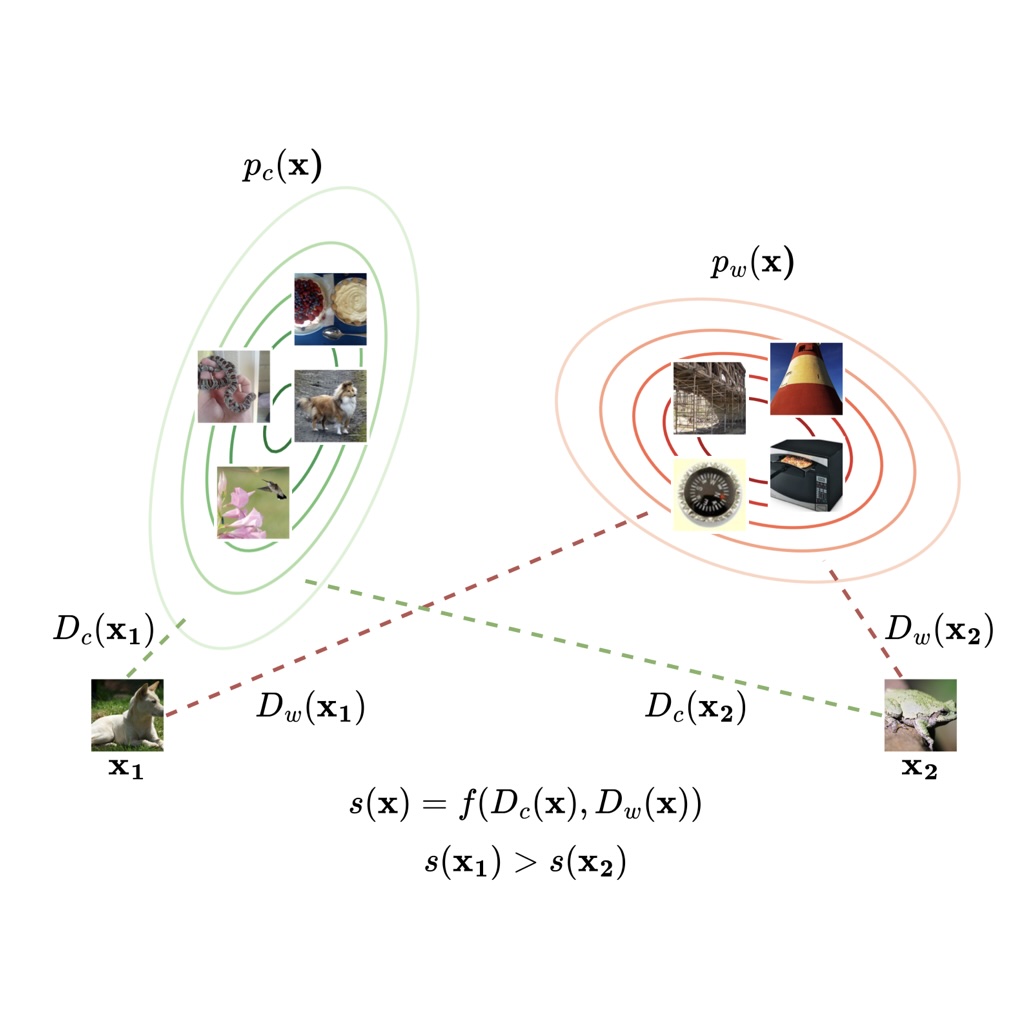
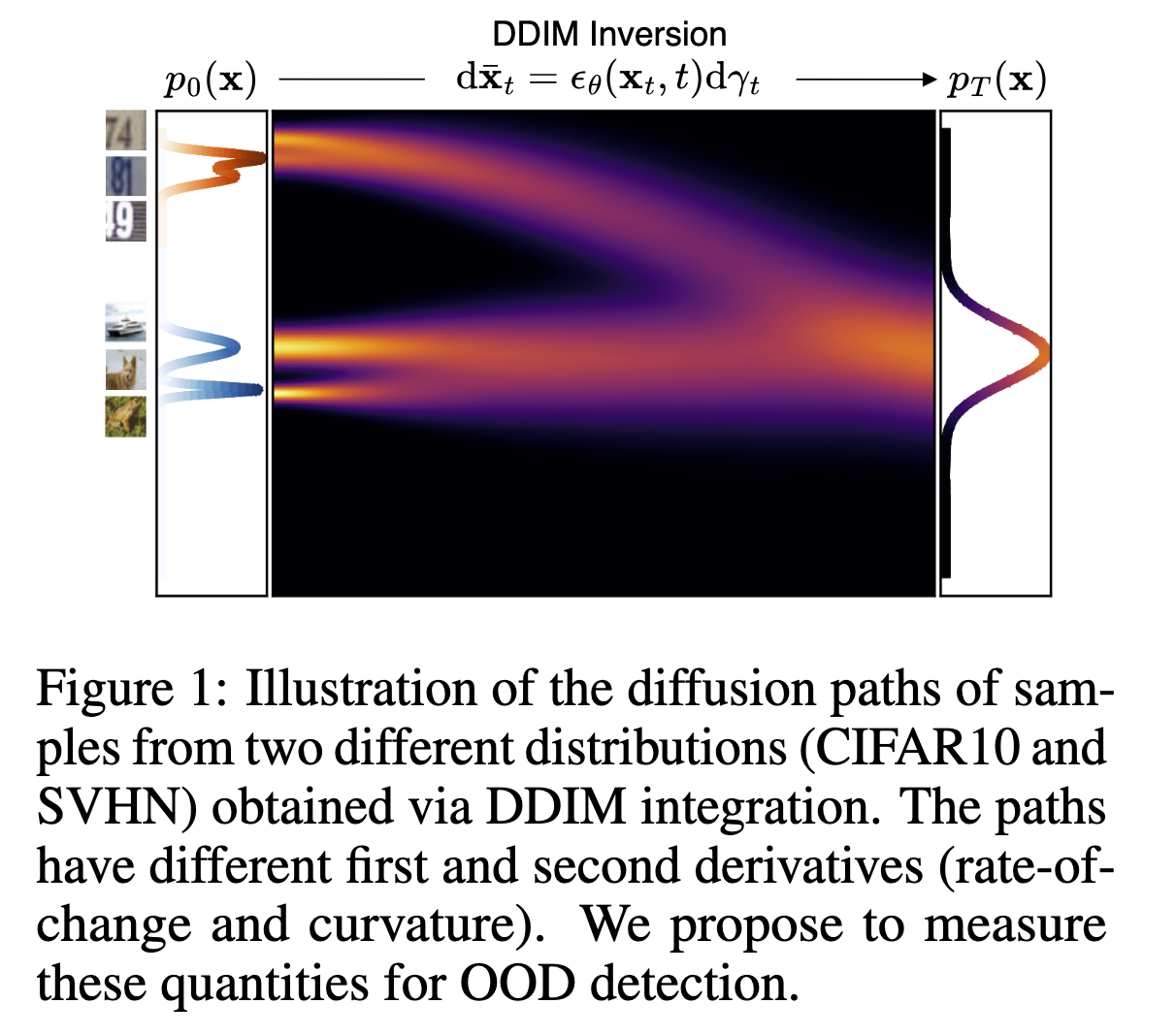
Out-of-distribution with a single unconditional diffusion model.
18 Oct 2024
learn
fairness
TMLR
12 Oct 2024
learn
generative
RA-L
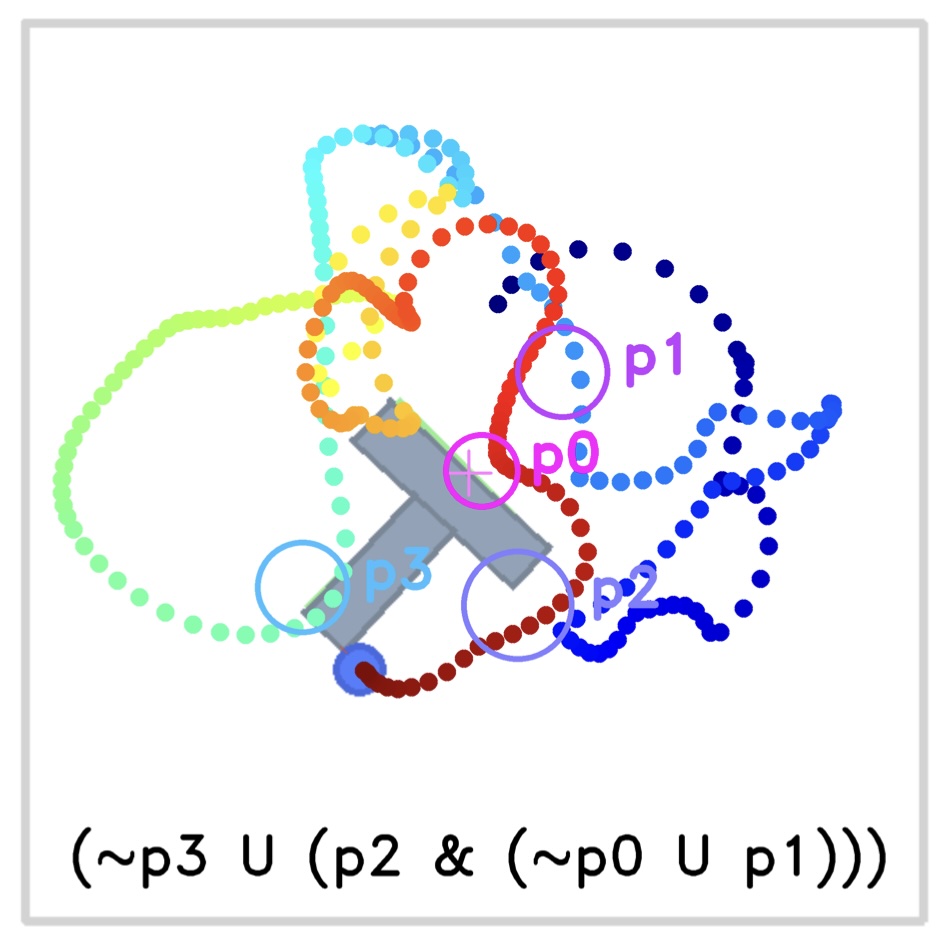
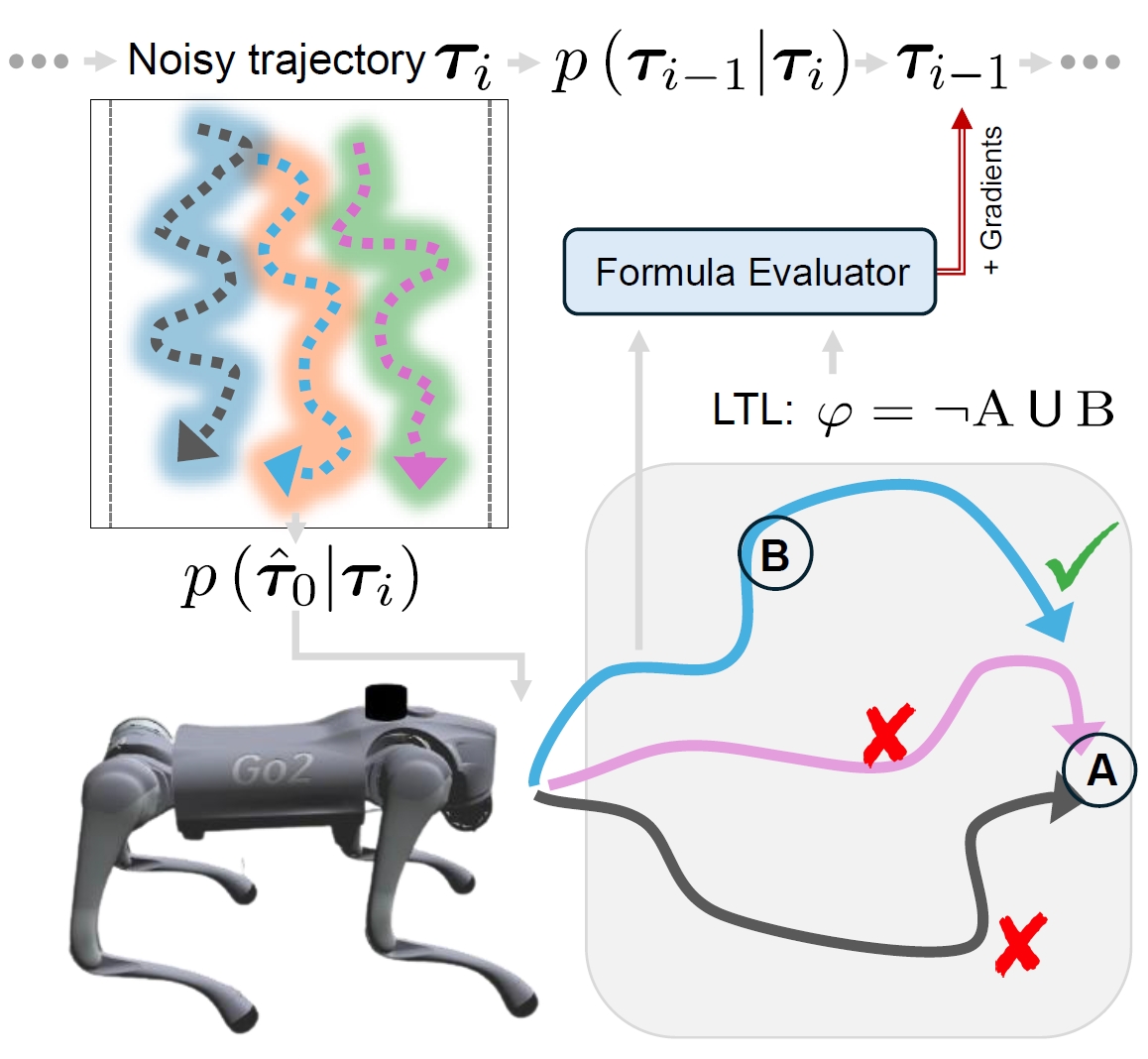
LTLDoG Code and Experiments
21 Aug 2024
generative
learn
Flow-Guided Density Ratio Learning (FDRL) Code
01 Jun 2024
learn
touch
RSS
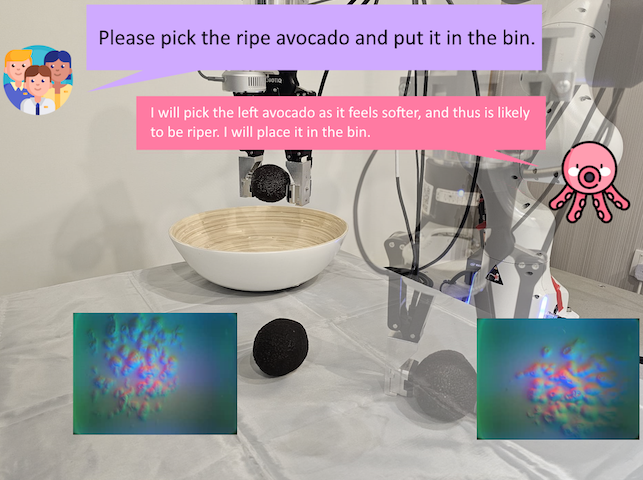
Octopi: Object Property Reasoning with Large Tactile-Language Models
14 May 2024
learn
physical
generative
RSS
BRIDGER code and Experiments
14 May 2024
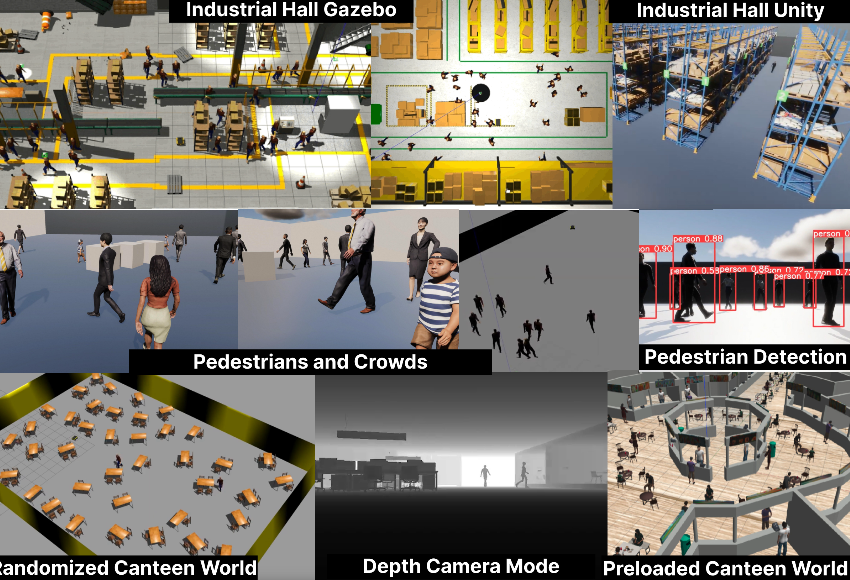
social
navigation
RSS
Arena Rosnav - Social Navigation Development Platform
14 May 2024
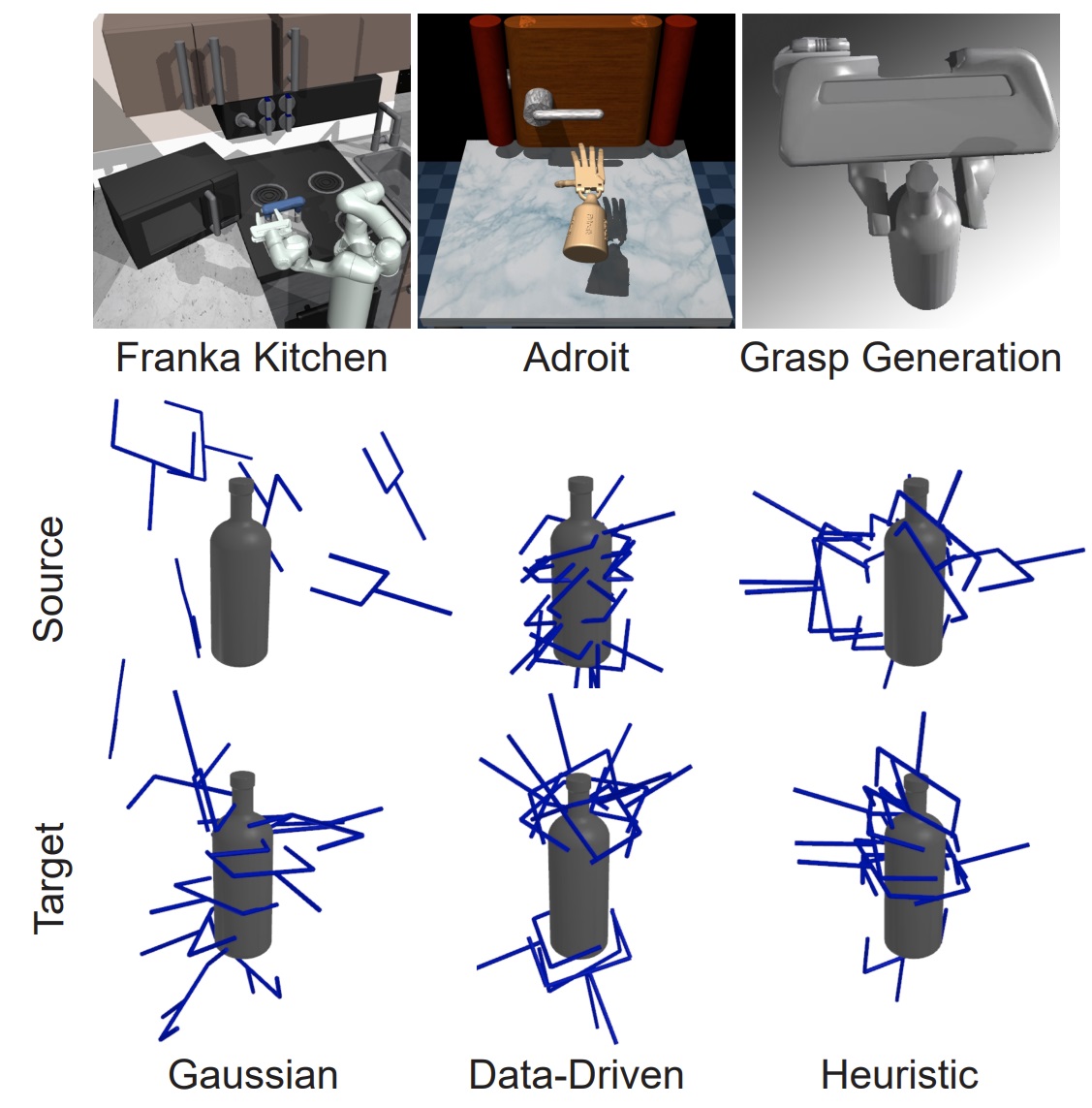
physical
learn
RSS
GRaCE codes
14 May 2024
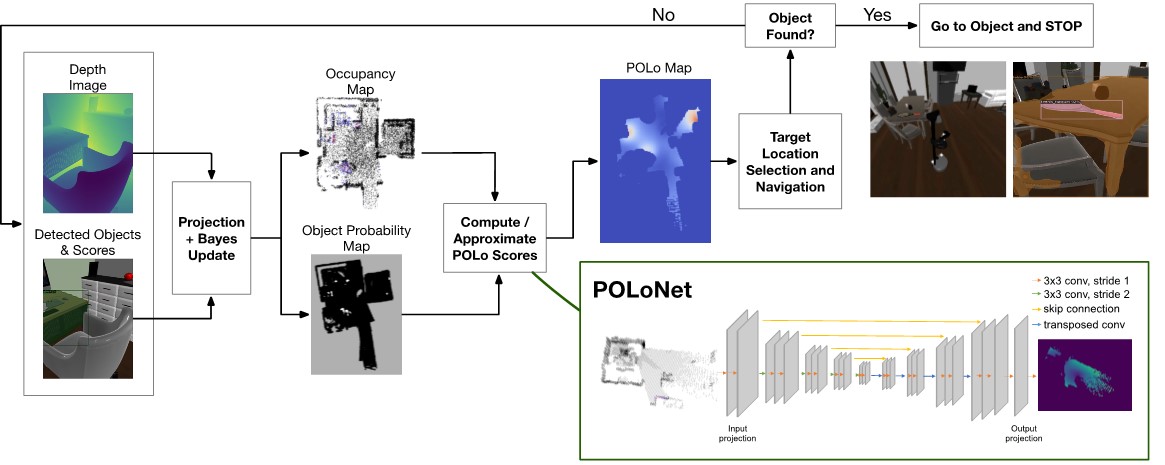
learn
navigation
ICRA
POLoNet and POLo agent implementation in PyTorch.
19 Apr 2024
generative
NeurIPS
learn
Continual learning for forgetting in deep generative models
22 Sep 2023
learn
generative
IROS
LEAPT code and Experiments
24 Aug 2023
social
learn
trust
LLM-based zero-shot human model examples
24 Aug 2023
learn
IROS
GraspFlow codes and dataset
20 Aug 2023
learn
social
Goal Translation Examples
26 Jan 2023
learn
ICRA
SFT-CoP Code and Experiments
21 Jan 2023
learn
AI-HRI
Code for research on observed adversaries.
13 Oct 2022
social
fairness
learn
AIES
SCALES Fairness Experiments
01 Aug 2022
social
learn
trust
RSS
Mirror code and Experiments
13 Apr 2022
learn
generative
NeurIPS
REDSDS Code for Switching Dynamical Systems
01 Dec 2021
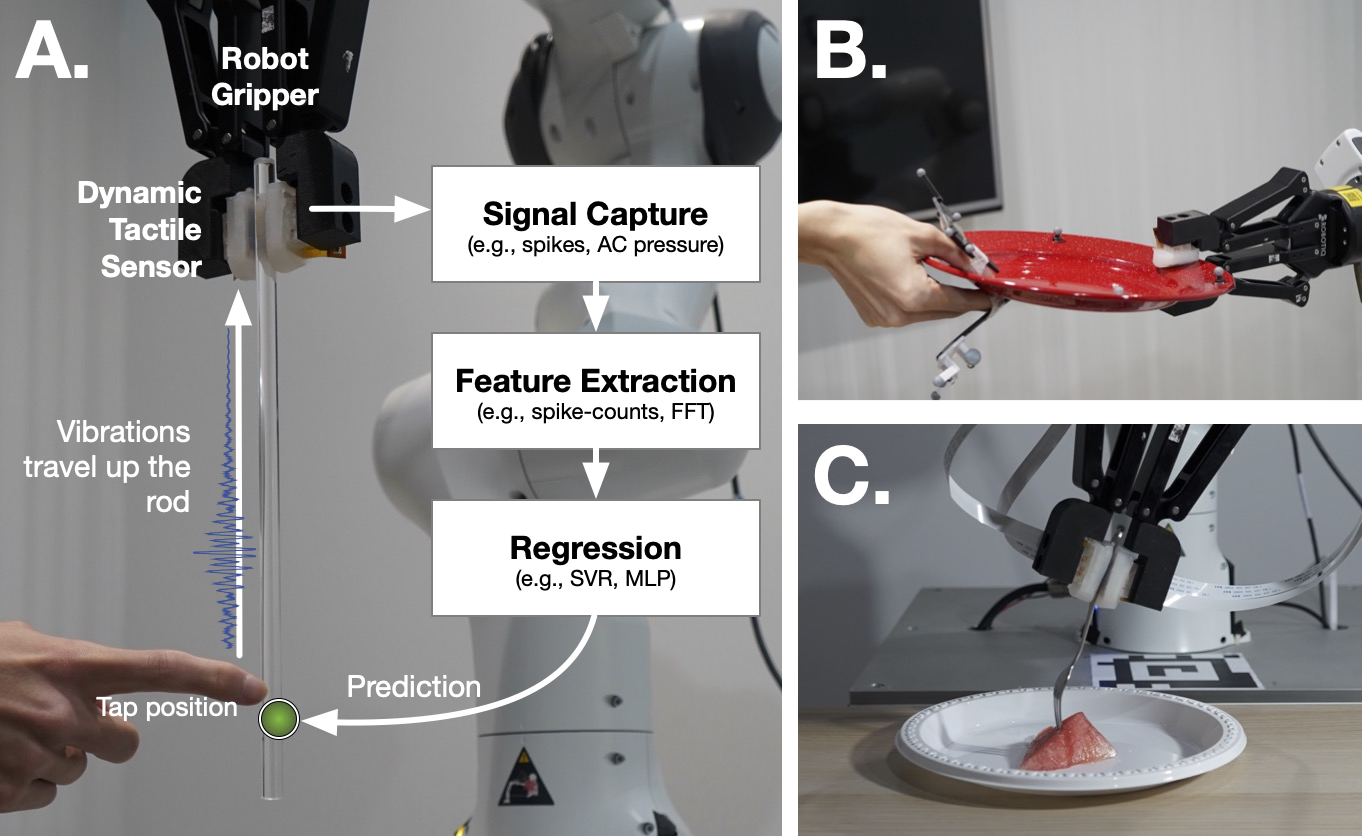
physical
touch
IROS
Extended Tactile Perception: Code and Experiments
27 Sep 2021
learn
generative
ICRA
MuMMI code and Experiments
28 Feb 2021
generative
learn
ICLR
DGflow code and Experiments
12 Feb 2021
physical
touch
RSS
VT-SNN: Visual-Tactile Spiking Neural Network
30 Jan 2021
social
trust
HRI
TICC-POMDP Code
24 Oct 2020
physical
touch
IROS
Code and Dataset for TactileSGNet
01 Jul 2020
physical
touch
IROS
GP and Neural models for human-trust transfer
01 Jul 2020
learn
generative
CVPR
Code for CHyVAE
14 Jun 2020
learn
HRI
An cooperative reinforcement learning experiment built on top of Juiced.
01 Mar 2020
social
trust
IJRR
GP and Neural models for human-trust transfer
01 Jan 2020
learn
knowledge
NeurIPS
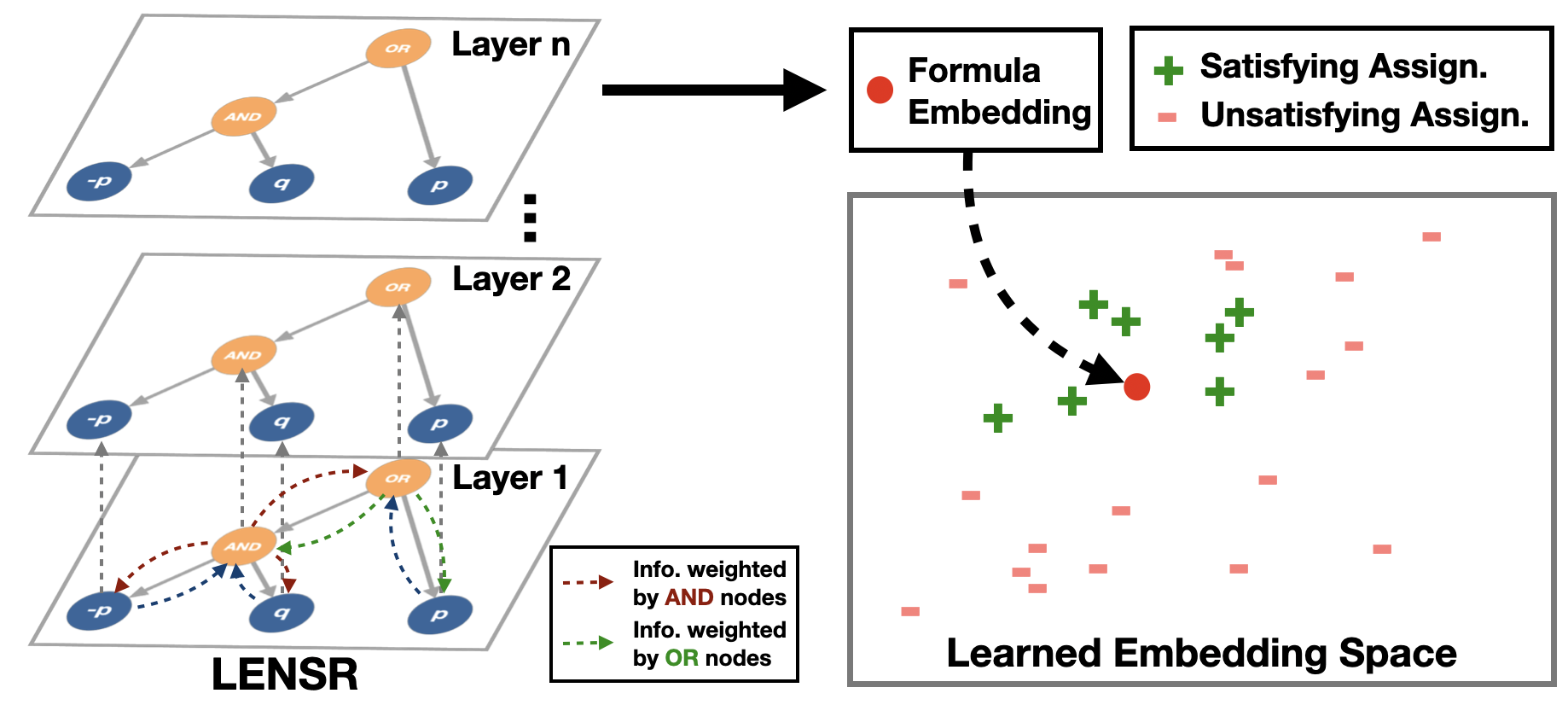
Embedding Symbolic Knowledge into Deep Networks
08 Dec 2019
physical
touch
ICRA
iCub dataset for Tactile Identification of Textures using a Hybrid Touch Approach
26 Jan 2019
learn
Social
neurips
Embedding Symbolic Knowledge into Deep Networks
30 Jun 2018