
Fast texture classification using tactile neural coding and spiking neural network, Tasbolat Taunyazov★, Yansong Chua, Ruihan Gao, Harold Soh★, Yan Wu, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Links:
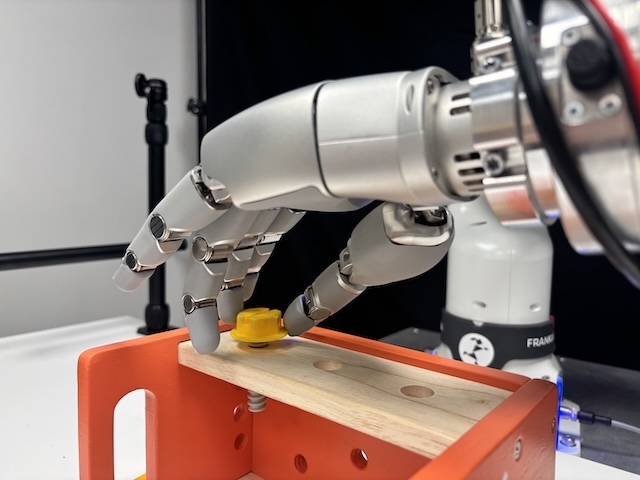
Touch is arguably the most important sensing modality in physical interactions. However, tactile sensing has been largely under-explored in robotics applications owing to the complexity in making perceptual inferences until the recent advancements in machine learning or deep learning in particular. Touch perception is strongly influenced by both its temporal dimension similar to audition and its spatial dimension similar to vision. While spatial cues can be learned episodically, temporal cues compete against the system’s re-sponse/reaction time to provide accurate inferences. In this paper, we propose a fast tactile-based texture classification framework which makes use of the spiking neural network to learn from the neural coding of the conventional tactile sensor readings. The framework is implemented and tested on two independent tactile datasets collected in sliding motion on 20 material textures. Our results show that the framework is able to make much more accurate inferences ahead of time as compared to that by the state-of-the-art learning approaches.
Resources
You can find our paper here. Check out our repository here on github
Citation
Please consider citing our paper if you build upon our results and ideas.
Tasbolat Taunyazov★, Yansong Chua, Ruihan Gao, Harold Soh★, Yan Wu, “Fast texture classification using tactile neural coding and spiking neural network”, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
@inproceedings{taunyazov2020fast,
title = {Fast texture classification using tactile neural coding and spiking neural network},
author = {Taunyazov, Tasbolat and Chua, Yansong and Gao, Ruihan and Soh, Harold and Wu, Yan},
booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages = {9890--9895},
year = {2020},
organization = {IEEE} }
Contact
If you have questions or comments, please contact Tasbolat Taunyazov.



{kind=link}