
Update
Octopi-1.5 is here — our latest visual-tactile-language model (VTLM), demonstrated live at R:SS 2025 with a handheld tactile interface (no robot required). Paper: arXiv:2507.09985 · Code & TMI gripper design: github.com/clear-nus/octopi-1.5.

What’s new vs. Octopi 1.0:
- Multi-part object reasoning. Octopi-1.5 processes tactile signals from multiple parts of an object — e.g., the handle vs. the bristles of a hairbrush — and can describe and rank those parts. The original Octopi reasoned about objects as a whole.
- Retrieval-Augmented Generation (RAG). A retrieval module augments tactile descriptions with information from similar objects in a database, improving predictions and letting the model learn new object–tactile pairings on-the-fly, without retraining.
- New tactile encoder. A fine-tuned CLIP (L/14) module with a projection layer, pre-trained with contrastive and regression losses on an expanded PhysiCLeAR dataset (marker and markerless GelSight pads) plus the Hardness and ObjectFolder-Real datasets. For efficiency, only the top-10 “salient” frames (largest frame-to-frame changes) are processed.
- Stronger VLM backbone. Built on Qwen2-VL 7B, upgrading from the Llama backbone used in the original Octopi.
- Tactile Manipulation Interface (TMI). A handheld, tactile-enabled interface (a modified UMI gripper) with GelSight Mini and TAC-02 sensors lets you interact with Octopi-1.5 live — no robot needed.
Together, these upgrades make Octopi-1.5 better at reasoning over complex, multi-part objects and at adapting to new objects after deployment.
Octopi 1.0
Octopi: Object Property Reasoning with Large Tactile-Language Models, Samson Yu★, Kelvin Lin★, Anxing Xiao, Jiafei Duan, and Harold Soh★, Robotics: Science and Systems (R:SS)
Links:
Check out our project page for more information!
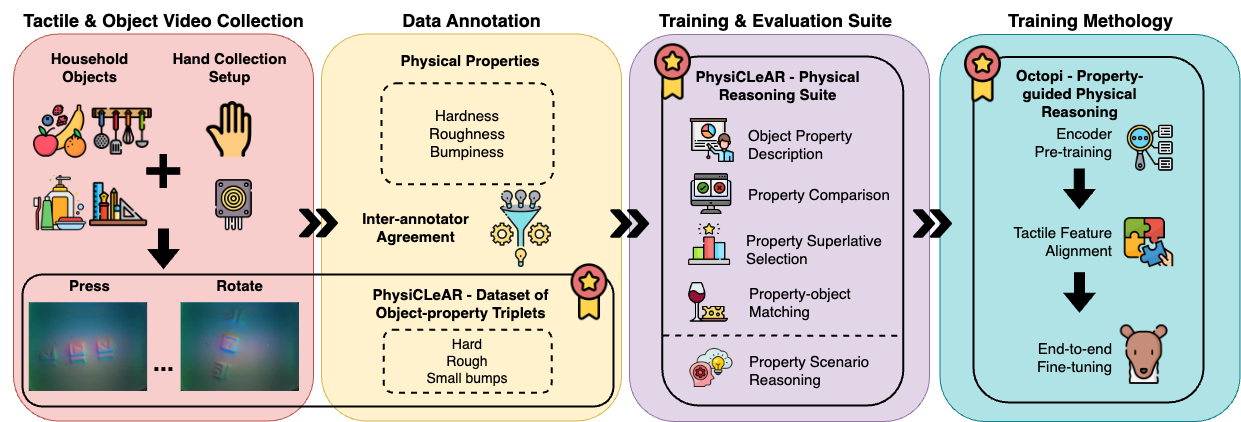
Abstract: Physical intelligence is important for effective robot,manipulation. Recent work has investigated both vision and language modalities for physical reasoning; vision can reveal information about objects in the environment and language serves as an abstraction and communication medium for additional context. Although these works have demonstrated success on a variety of physical reasoning tasks, they are limited to physical properties that can be inferred from visual or language inputs. In this work, we investigate combining tactile perception with language, which enables embodied systems to obtain physical properties through interaction and apply common-sense reasoning.
We contribute a new dataset PhysiCLeAR, which comprises both physical/property reasoning tasks and annotated tactile videos obtained using a GelSight tactile sensor. We then introduce Octopi, a system that leverages both tactile representation learning and large vision-language models to predict and reason about tactile inputs with minimal language fine-tuning. Our evaluations on PhysiCLeAR show that Octopi is able to effectively use intermediate physical property predictions to improve physical reasoning in both trained tasks and for zero-shot reasoning.
Resources
You can find our paper here and check out our github!
Citation
Please consider citing our paper if you build upon our results and ideas.
Samson Yu★, Kelvin Lin★, Anxing Xiao, Jiafei Duan, and Harold Soh★, “Octopi: Object Property Reasoning with Large Tactile-Language Models”, Robotics: Science and Systems (R:SS)
@article{yu2024octopi, title={Octopi: Object Property Reasoning with Large Tactile-Language Models}, author={Yu, Samson and Lin, Kelvin and Xiao, Anxing and Duan, Jiafei and Soh, Harold}, journal={arXiv preprint arXiv:2405.02794}, year={2024} }
Contact
If you have questions or comments, please contact Samson or Harold.






{kind=link}