TOPO-Bench: Benchmarking Topological Mapping under Perceptual Aliasing
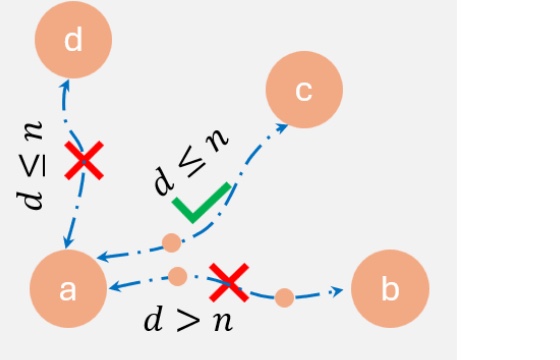
An open-source framework for evaluating topological mapping, with the first quantitative measure of dataset ambiguity (perceptual aliasing).

An open-source framework for evaluating topological mapping, with the first quantitative measure of dataset ambiguity (perceptual aliasing).
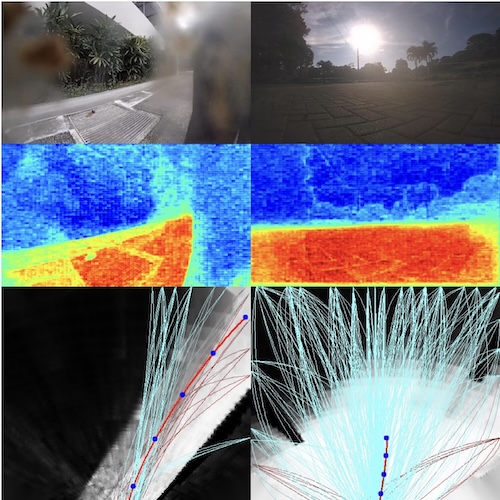
We present a robust navigation framework designed for global deployment that achieved first place in the Earth Rover Challenge at ICRA 2025.
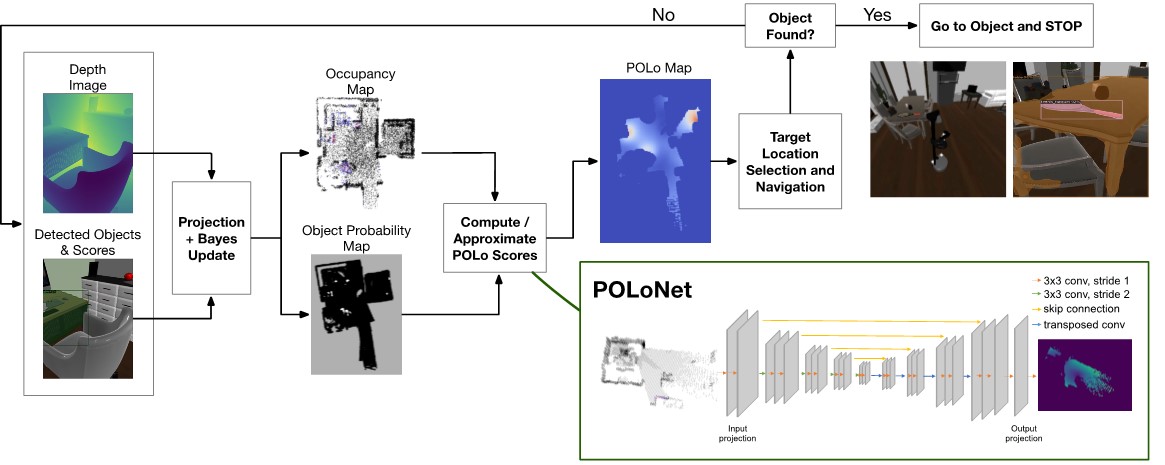
We introduce a novel framework centered around the Probable Object Location (POLo) score, which allows the agent to make data-driven decisions for efficient object search.