Guided Streaming Stochastic Interpolant Policy
A principled inference-time guidance framework for streaming generative robot policies, enabling fast, reactive obstacle avoidance within the action chunk.

Collaborative Learning and Adaptive Robots (CLeAR) Lab.
Below, you’ll find our contributions to generative modeling/AI and their applications (typically in robotics). At CLeAR, we have developed new deep generative models that are based on gradient flows and structured temporal models that can capture complex relationships, yet are interpretable and useful for planning and decision-making.
A principled inference-time guidance framework for streaming generative robot policies, enabling fast, reactive obstacle avoidance within the action chunk.
We introduce a plug-and-play module that corrects off-manifold drift when guiding flow models with multiple rewards at inference time.
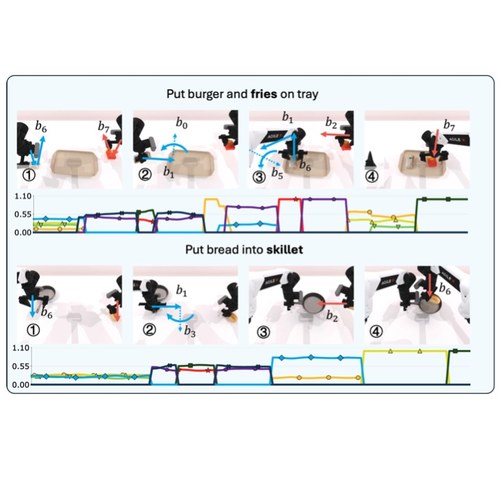
Skill Mixture-of-Experts Policy (SMP)—a diffusion mixture-of-experts policy that learns a compact orthogonal skill basis and uses sticky routing for scalable, efficient multi-task manipulation.
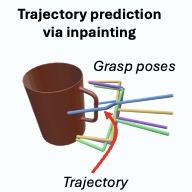
DISCO uses vision-language models to guide diffusion policies with optimized keyframe inpainting, enabling superior zero-shot open-vocabulary robotic manipulation.
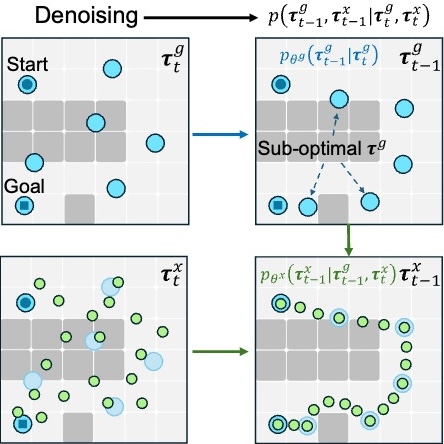
We propose CHD, a unified diffusion-based framework that tightly couples sub-goal and trajectory generation to improve long-horizon task planning.
DOPPLER is a new framework that combines diffusion models and hierarchical reinforcement learning to let robots plan and replan complex, long-horizon tasks from offline data with robustness in the real world.
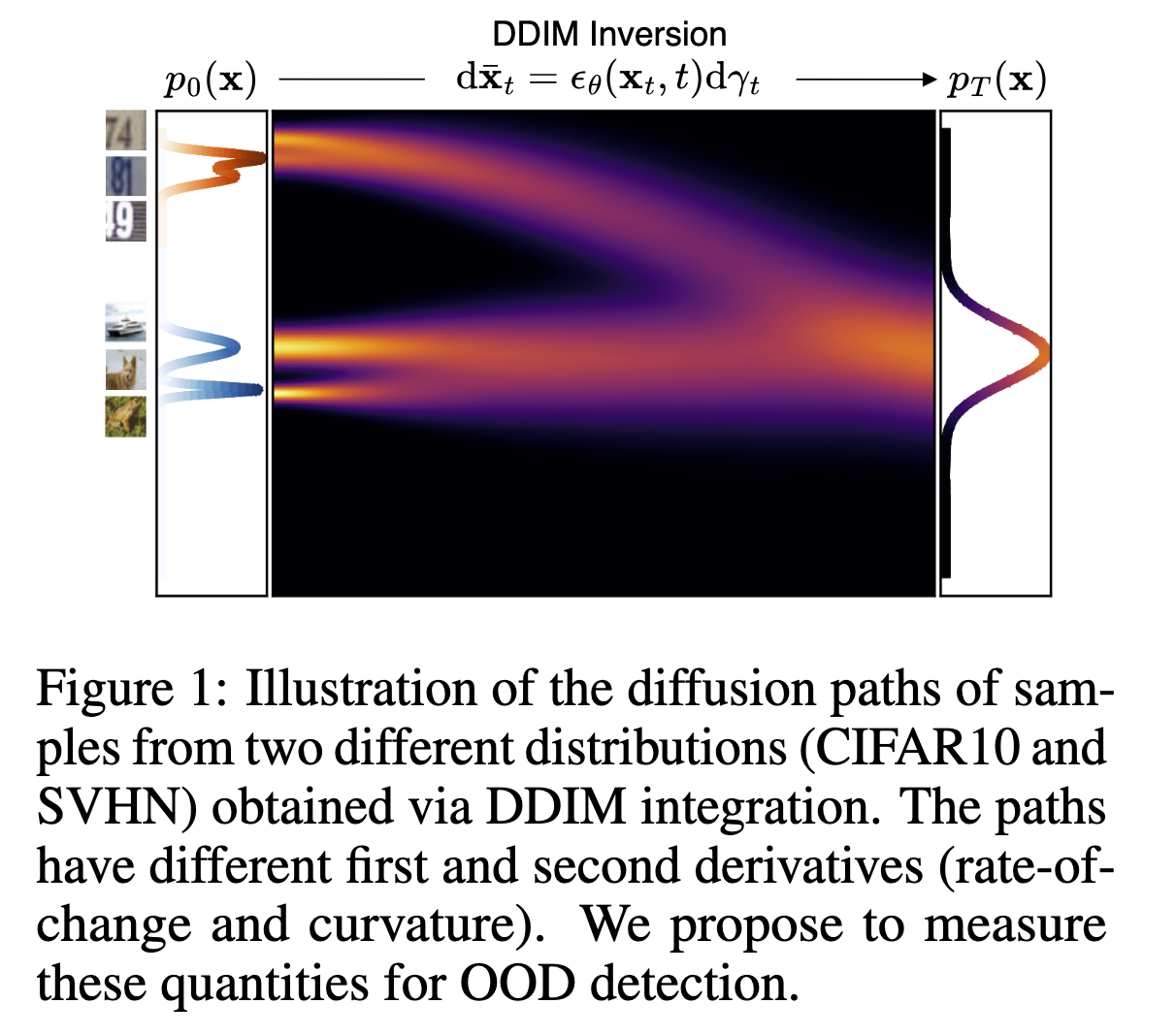
We show that a single unconditional diffusion model performs competitively in out-of-distribution detection tasks by measuring the rate-of-change and curvature of diffusion paths connecting data samples to the standard normal distribution.
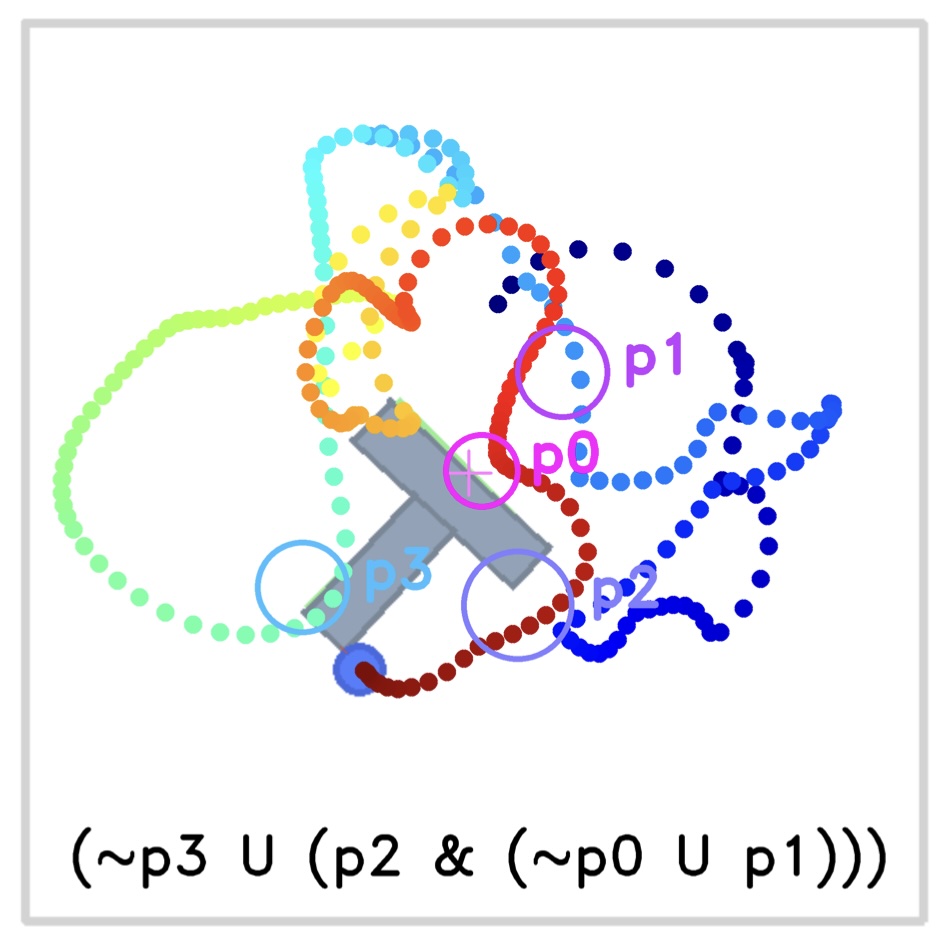
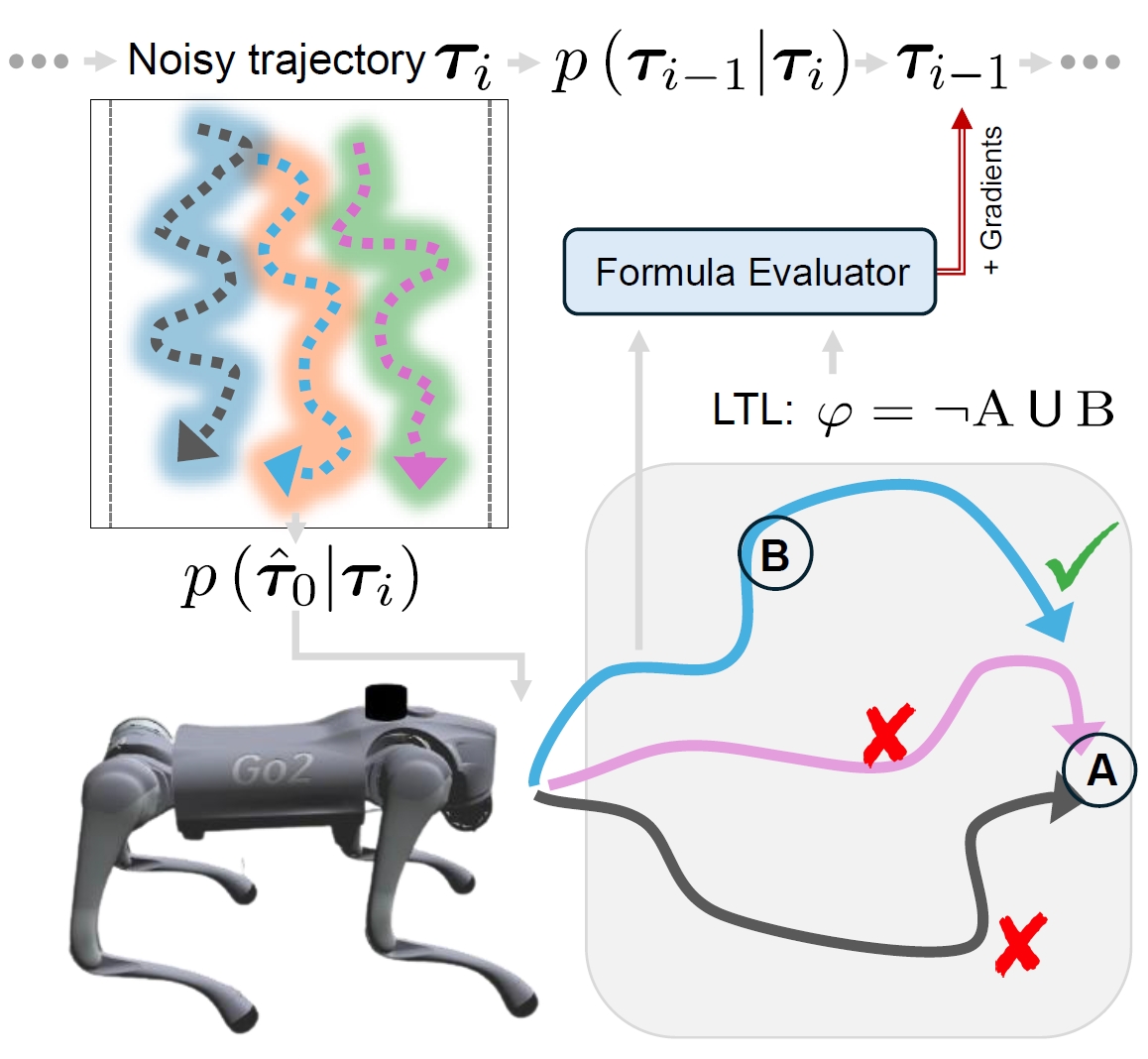
We develop a safe planning method for trajectory generation by sampling from diffusion model under different LTLf constraints.
We extend gradient flow methods to a variety of high-quality image synthesis tasks using a novel density ratio learning method.
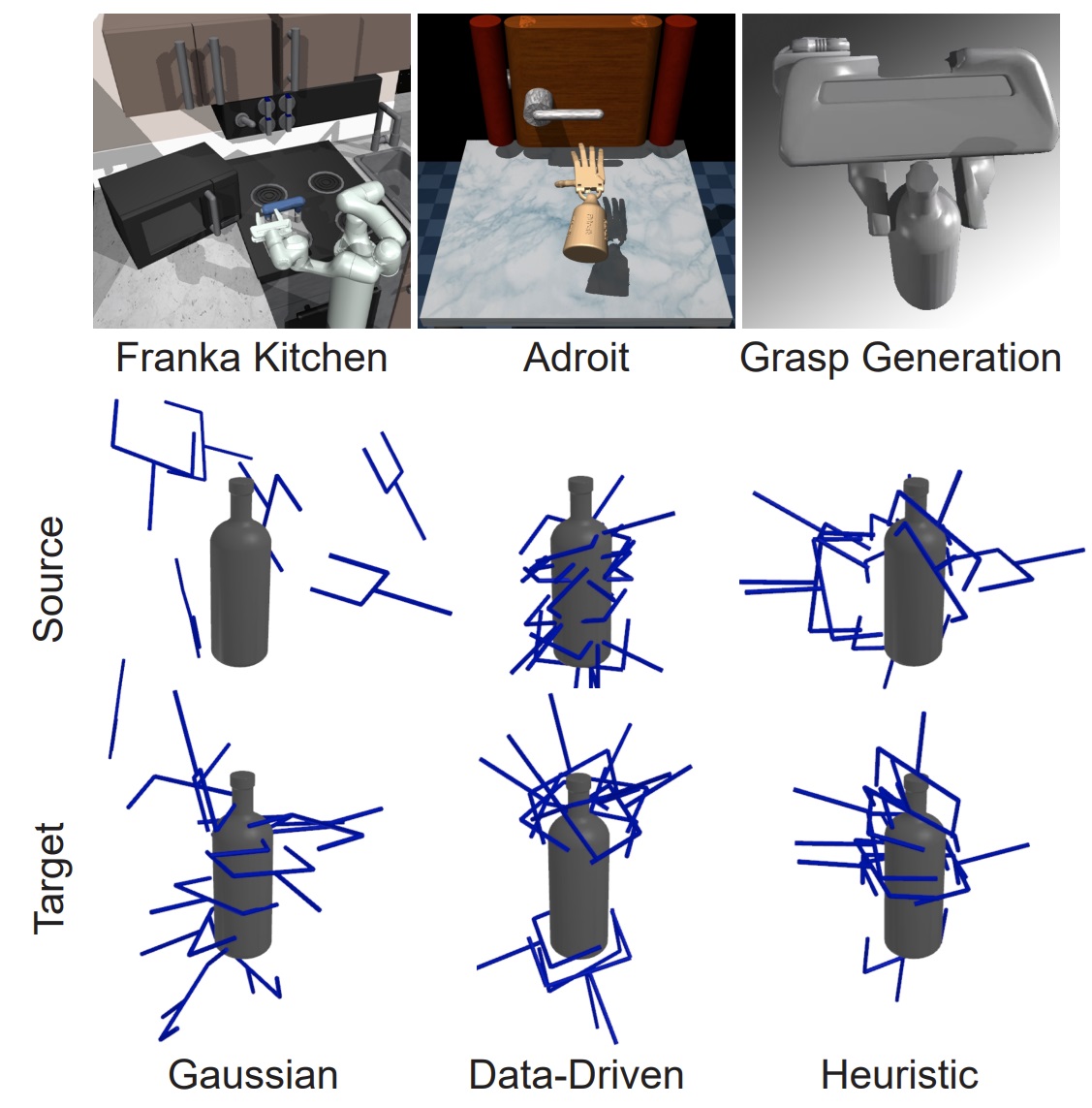
We develop interpolant policies that leverage informative source distributions for imitation learning.
We apply techniques from continual learning to the problem of selective forgetting in deep generative models. Our method, dubbed Selective Amnesia, allows users to remap undesired concepts to user-defined ones.
We construct a decomposed latent state space model for perspective-taking for human robot interaction.
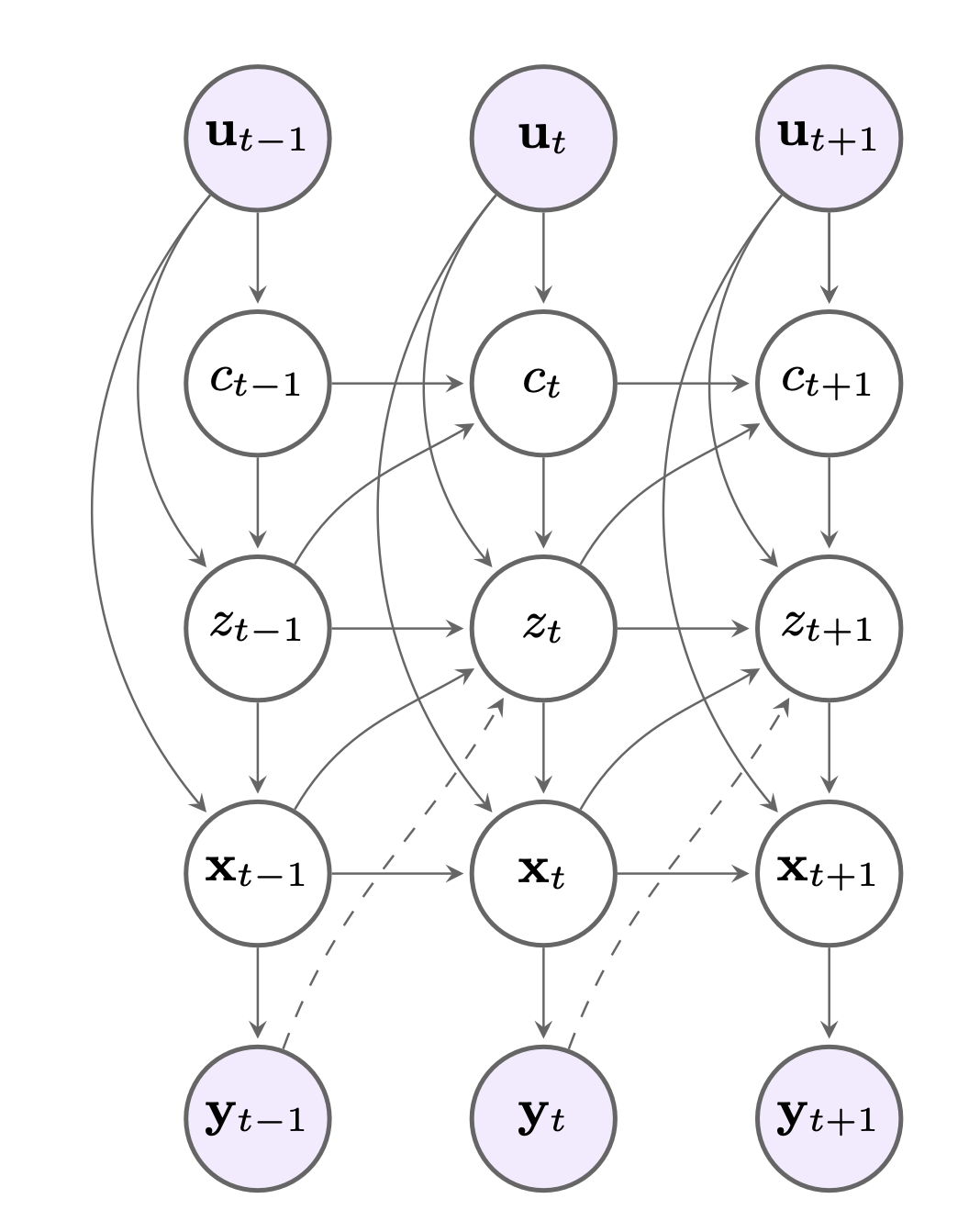
We propose a deep switching state space model that can capture both state-dependent and time-dependent switching patterns in time series data.
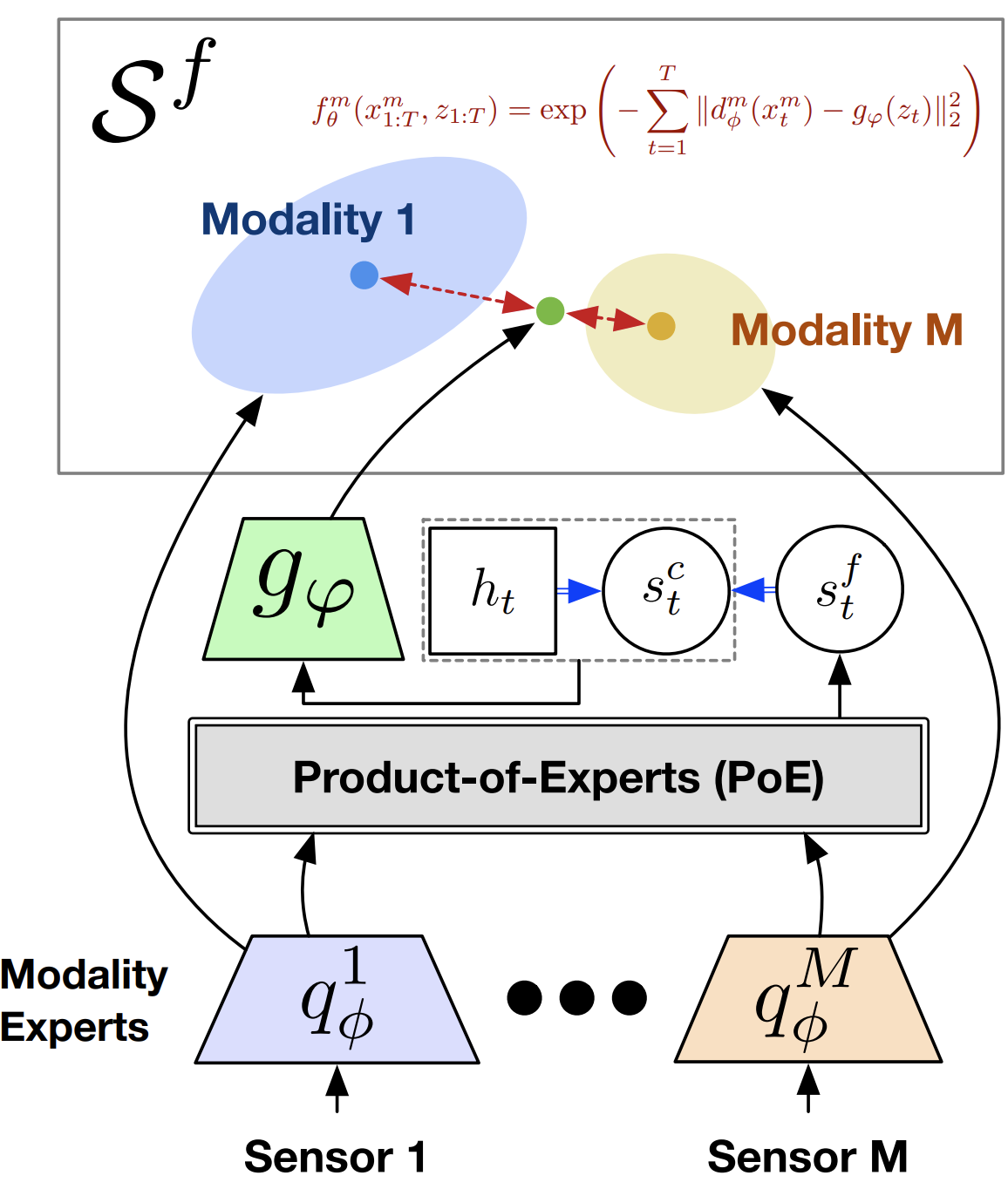
We construct a shared latent space from different sensory modalities via contrastive learning.
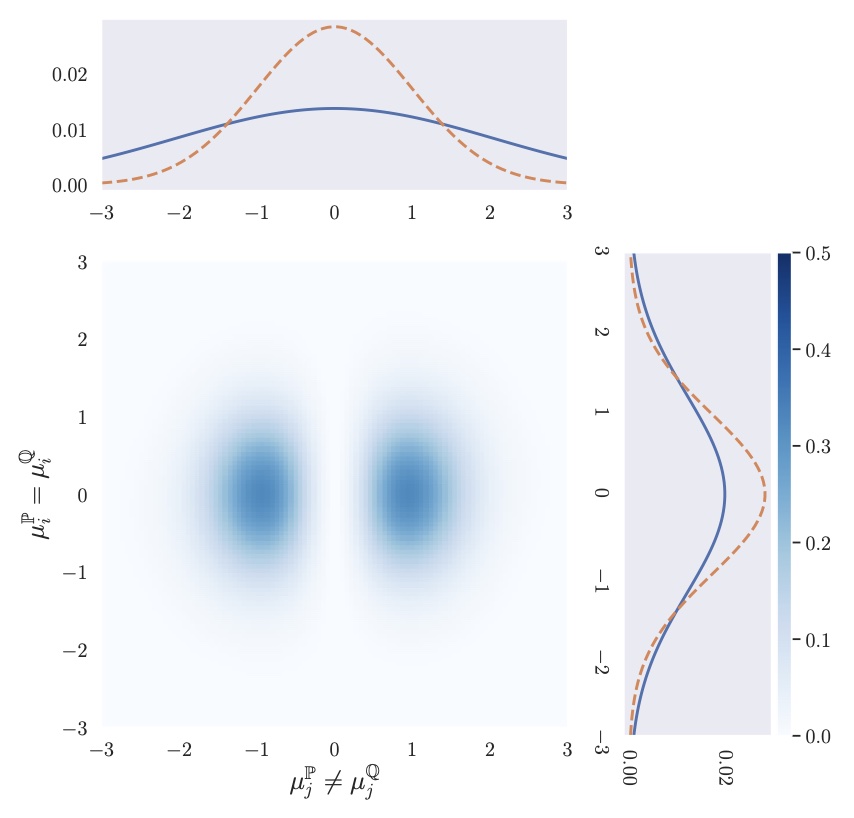
We present a new method for training GANs via characteristic functions
We present an approach to generate new items for groups of users based on their interaction history.