Don’t Start from Scratch: Behavioral Refinement via Interpolant-based Policy Diffusion
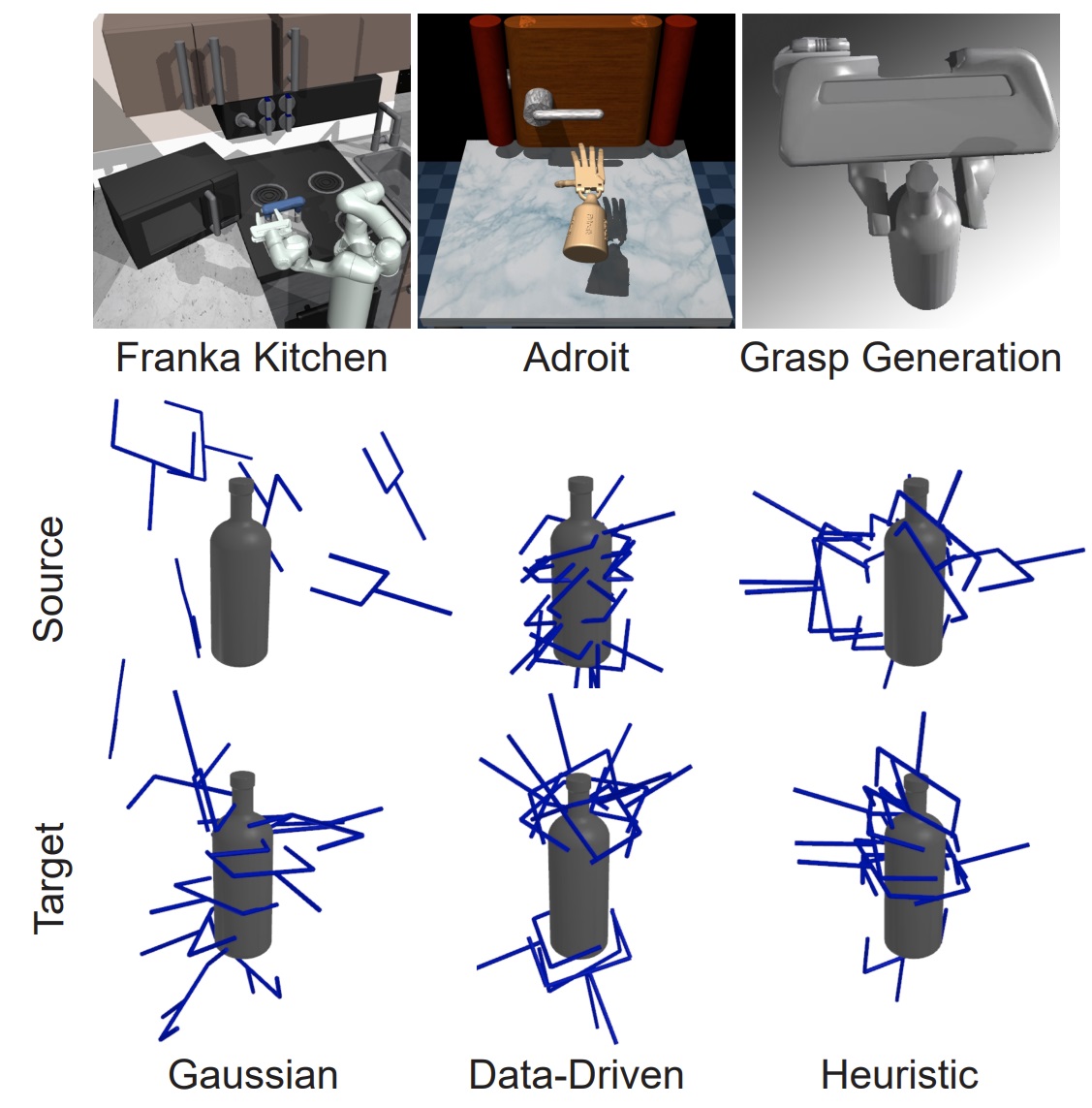
We develop interpolant policies that leverage informative source distributions for imitation learning.

We develop interpolant policies that leverage informative source distributions for imitation learning.
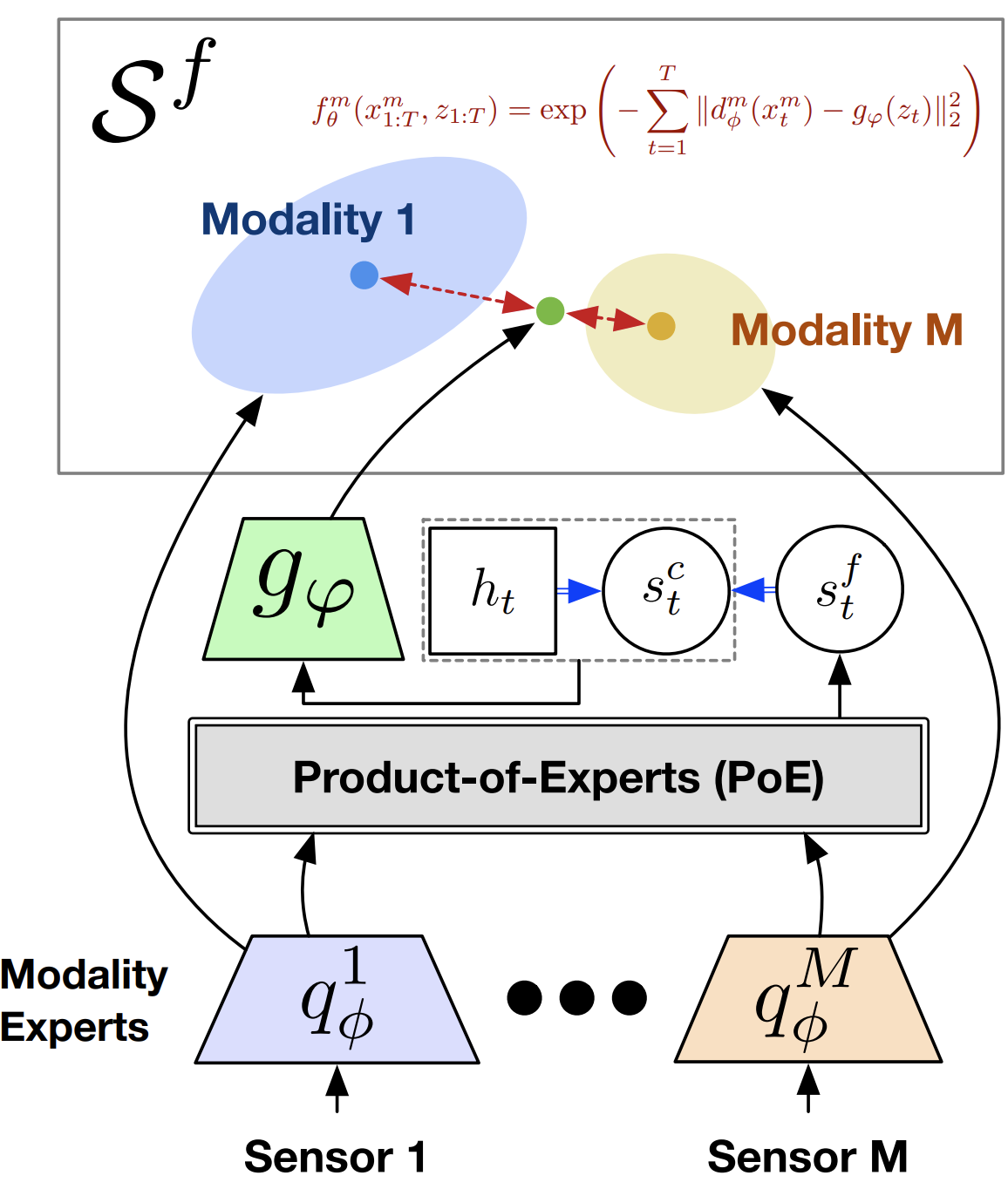
We construct a decomposed latent state space model for perspective-taking for human robot interaction.
Inspired by Social Projection Theory, we use the robot's self model to efficiently model humans.
We construct a shared latent space from different sensory modalities via contrastive learning.