
Event-Driven Visual-Tactile Sensing and Learning for Robots, Tasbolat Taunyazov★, Weicong Sng★, Hian Hian See, Brian Lim, Jethro Kuan★, Abdul Fatir Ansari★, Benjamin Tee, and Harold Soh★, Robotics: Science and Systems Conference (R:SS)
Links:
Many everyday tasks require multiple sensory modalities to perform successfully. For example, consider fetching a carton of soymilk from the fridge; humans use vision to locate the carton and can infer from a simple grasp how much liquid the carton contains. This inference is performed robustly using a power-efficient neural substrate — compared to current artificial systems, human brains require far less energy.
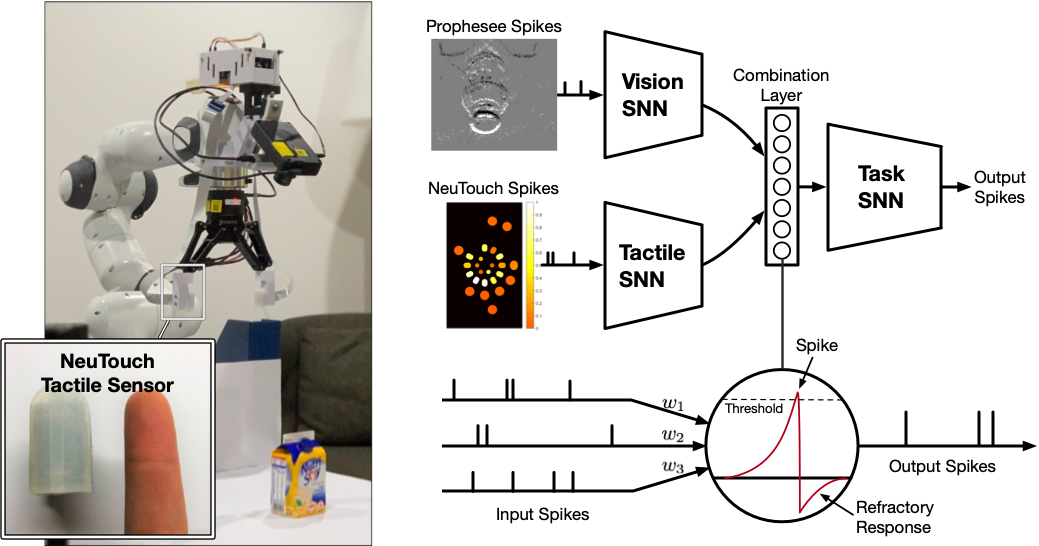
In this work, we gain inspiration from biological systems, which are asynchronous and event-driven. We contribute an event-driven visual-tactile perception system, comprising NeuTouch — a biologically-inspired tactile sensor — and the VT-SNN for multi-modal spike-based perception.
We evaluate our visual-tactile system (using the NeuTouch and Prophesee event camera) on two robot tasks: container classification and rotational slip detection. We show that relatively small differences in weight (approx. 30g across 20 object-weight classes) can be distinguished by our prototype sensors and spiking models. The second experiment indicates rotational slip can be accurately detected within 0.08s. When tested on the Intel Loihi, the SNN achieved inference speeds similar to a GPU, but required an order-of-magnitude less power.
Video
Our 5-minute Technical Talk at RSS 2020:
Our Paper

Event-Driven Visual-Tactile Sensing and Learning for Robots
Tasbolat Taunyazov, Weicong Sng, Hian Hian See, Brian Lim, Jethro Kuan, Abdul Fatir Ansari, Benjamin Tee, and Harold Soh
Robotics: Science and Systems Conference (R:SS), 2020. PDF.
@inproceedings{taunyazov20event,
title={Event-Driven Visual-Tactile Sensing and Learning for Robots},
author={Tasbolat Taunyazoz and Weicong Sng and Hian Hian See and Brian Lim and Jethro Kuan and
Abdul Fatir Ansari and Benjamin Tee and Harold Soh},
year={2020},
booktitle = {Proceedings of Robotics: Science and Systems},
year = {2020},
month = {July}}
Acknowledgements
This work was supported by the SERC, A*STAR, Singapore, through the National Robotics Program under Grant No. 172 25 00063, a NUS Startup Grant 2017-01, and the Singapore National Research Foundation (NRF) Fellowship NRFF2017-08. Thank you to Intel for access to the Neuromorphic Research Cloud.





{kind=link}