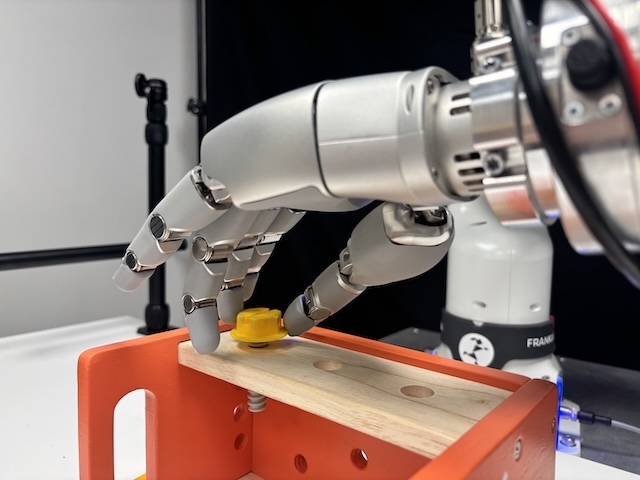
Heterogeneous Tactile Transformer (HTT)
A self-supervised tactile backbone that learns shared representations across heterogeneous tactile sensors, boosting perception and contact-rich manipulation—even with sensors unseen during pretraining.

A self-supervised tactile backbone that learns shared representations across heterogeneous tactile sensors, boosting perception and contact-rich manipulation—even with sensors unseen during pretraining.
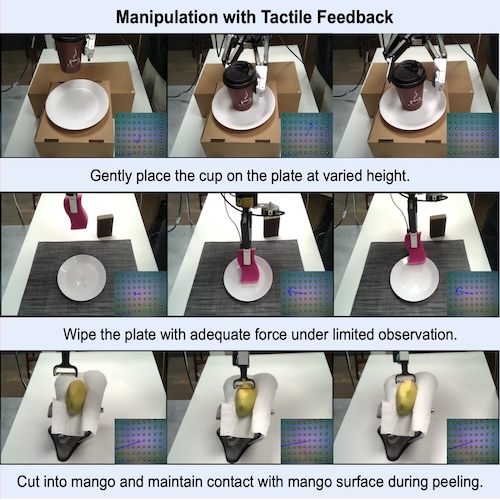
We present VLA-Touch, a framework for VLA models with dual-level tactile feedback for contact-rich manipulation.
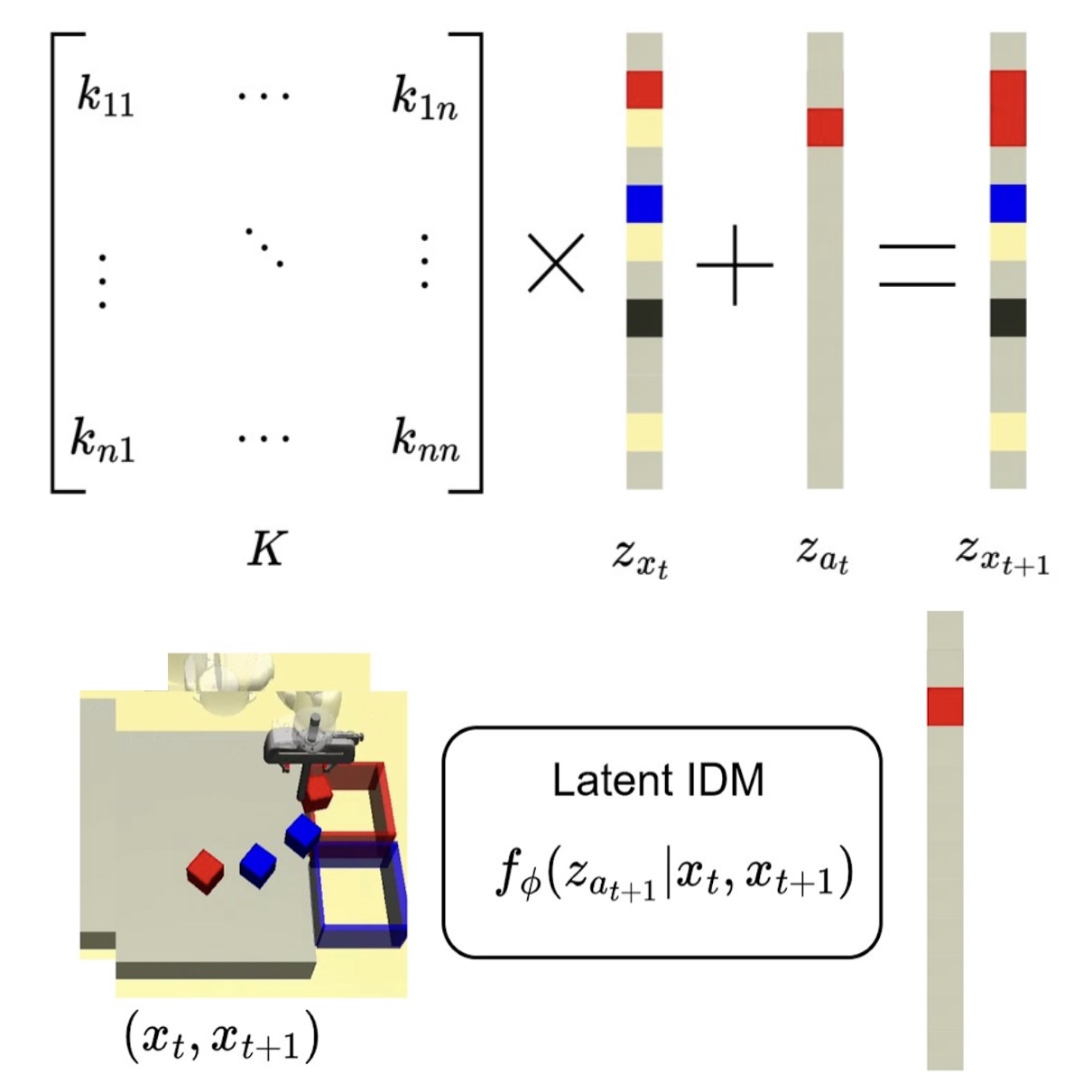
We introduce KOAP for imitation learning with limited actions.