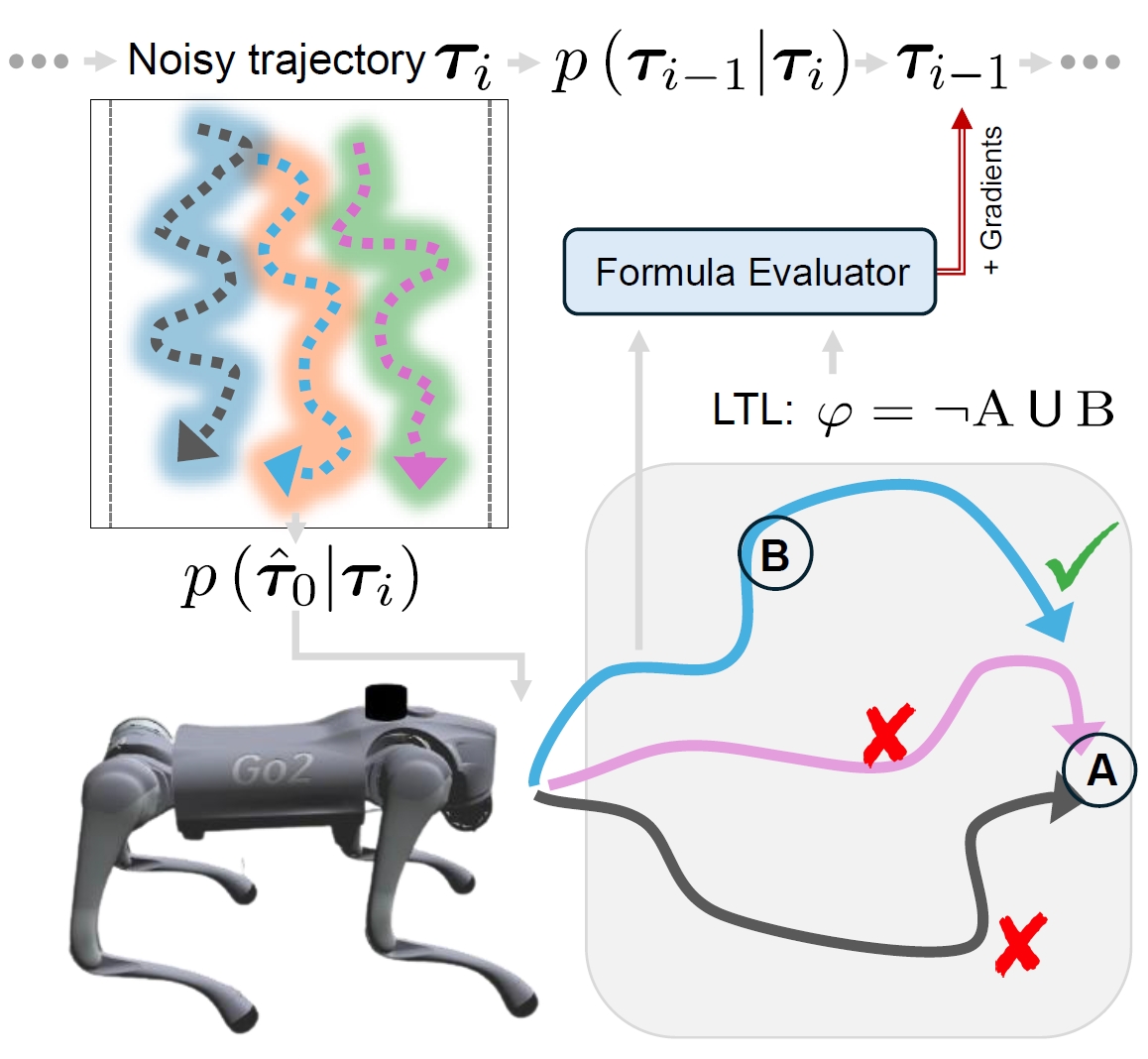
LTLDoG: Satisfying Temporally-Extended Symbolic Constraints for Safe Diffusion-based Planning
We develop a safe planning method for trajectory generation by sampling from diffusion model under different LTLf constraints.
Collaborative, Learning, and Adaptive Robots Lab at NUS
We develop a safe planning method for trajectory generation by sampling from diffusion model under different LTLf constraints.
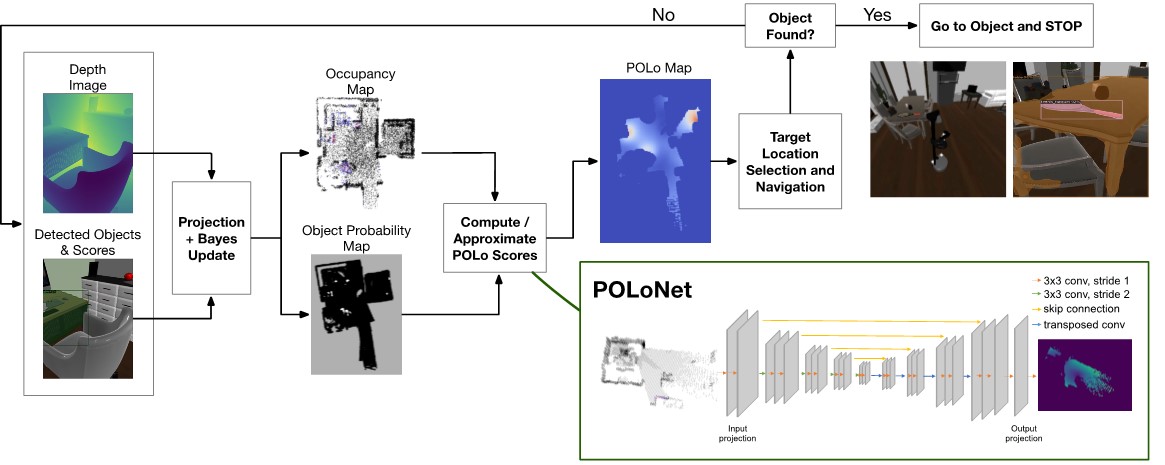
We introduce a novel framework centered around the Probable Object Location (POLo) score, which allows the agent to make data-driven decisions for efficient object search.
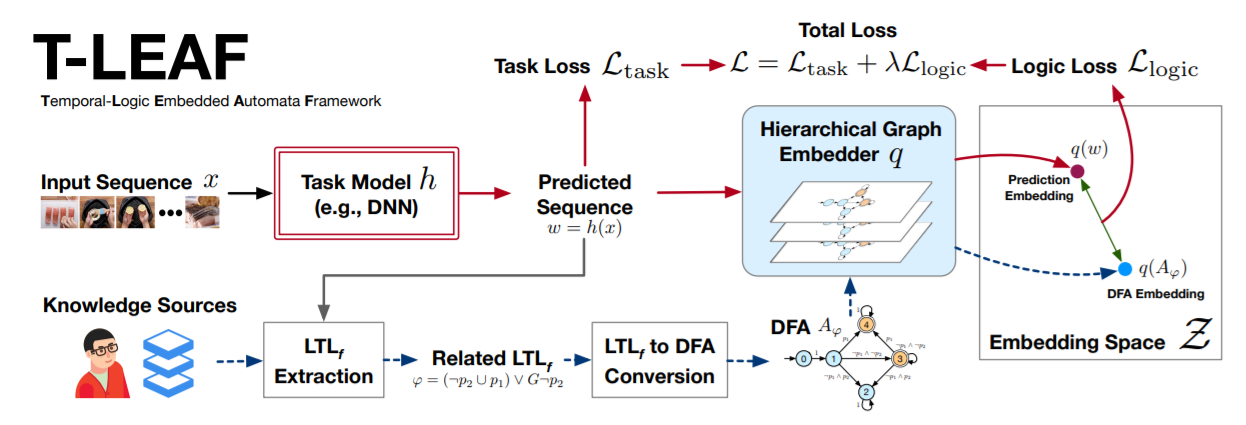
We embed symbolic knowledge expressed as linear temporal logic (LTL) and use these embeddings to guide the training of deep sequential models.
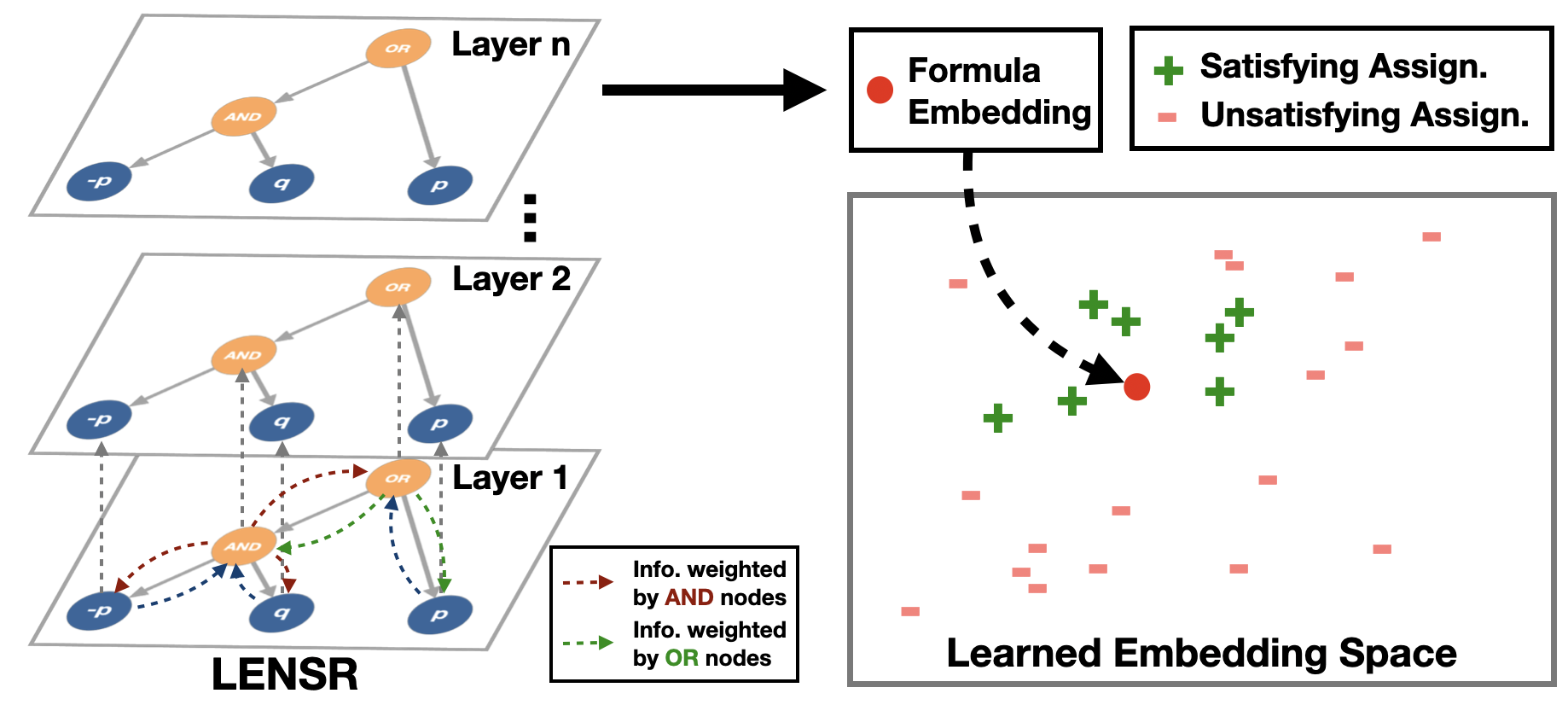
Leveraging prior symbolic knowledge to improve the performance of deep models.