Translating Natural Language to Planning Goals with Large-Language Models
We contribute an empirical study into the effectiveness of LLMs, specifically GPT-3.5 variants, for the task of natural language goal translation to PDDL.

Laruso blog features productivity, tips, inspiration and strategies for massive profits. Find out how to set up a successful blog or how to make yours even better!
We contribute an empirical study into the effectiveness of LLMs, specifically GPT-3.5 variants, for the task of natural language goal translation to PDDL.
Transfer source policies to a target reinforcement learning task with safety constraints using Successor Features.
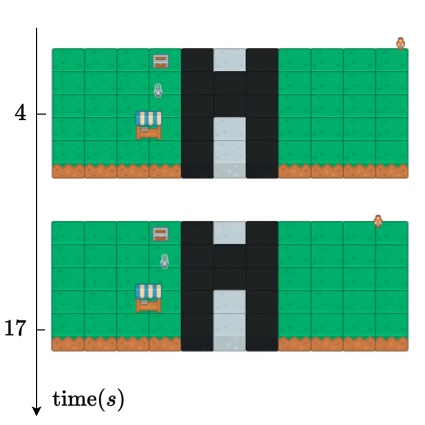
We examine the problem of observed adversaries for deep policies, where observations of other agents can hamper robot performance.
Our joint work with Desmond Ong, Jamil Zaki and Noah Goodman on Applying Probabilistic Programming to Affective Computing is one of 5 Best Papers (out of 82 ...
This paper proposes SCALES, a general framework that translates well-established fairness principles into a common representation based on CMDPs.
Kaiqi Chen is awarded the Research Achievement Award for his RSS 2022 paper on Differentiable Social Projection for Human Robot Communication.
We develop an accurate physics-inspired model for describing how a population of Q-learning agents adapt as they interact.