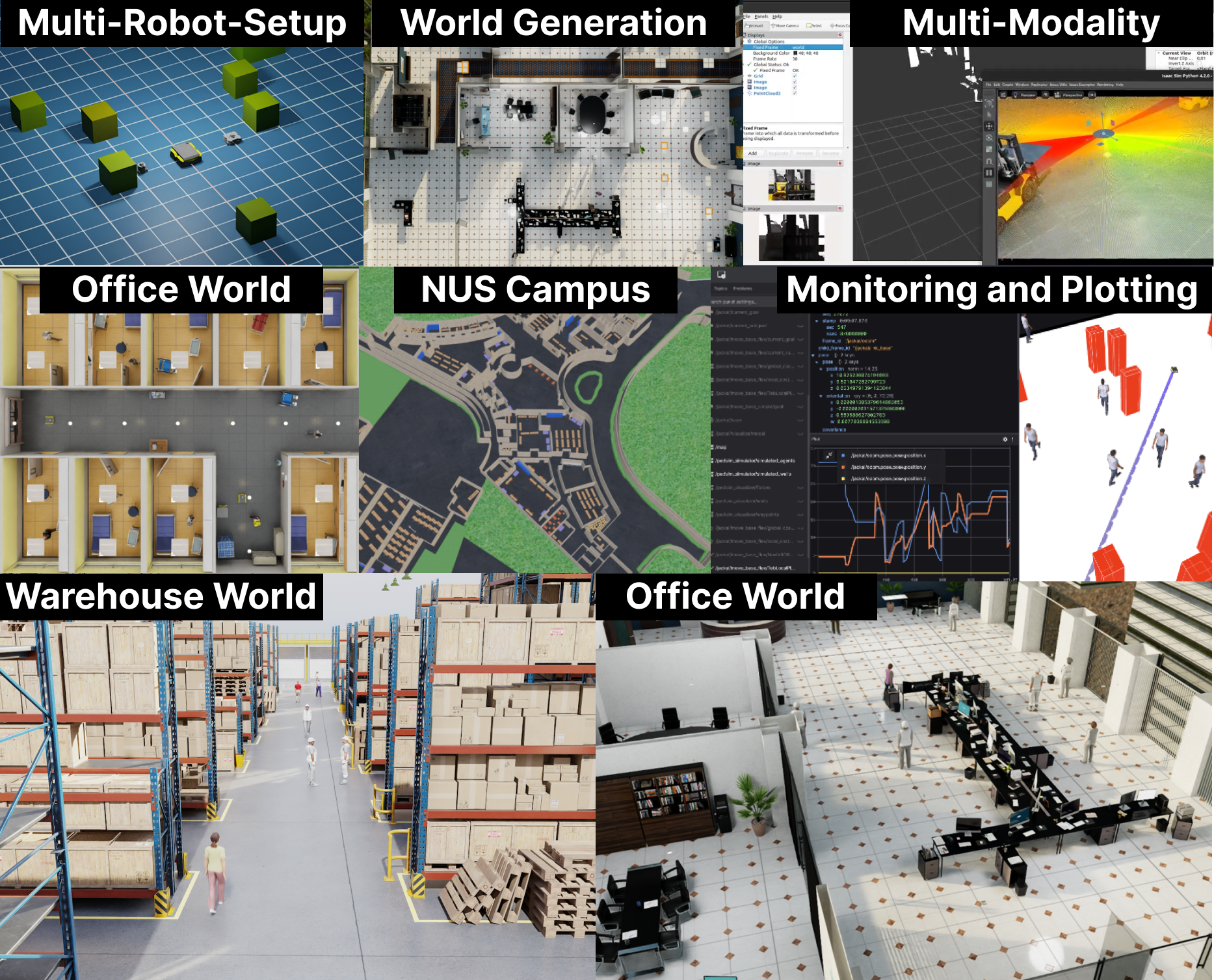
Arena 5.0 – A Photorealistic ROS2 Simulation Framework for Social Navigation with NVIDIA Isaac Gym
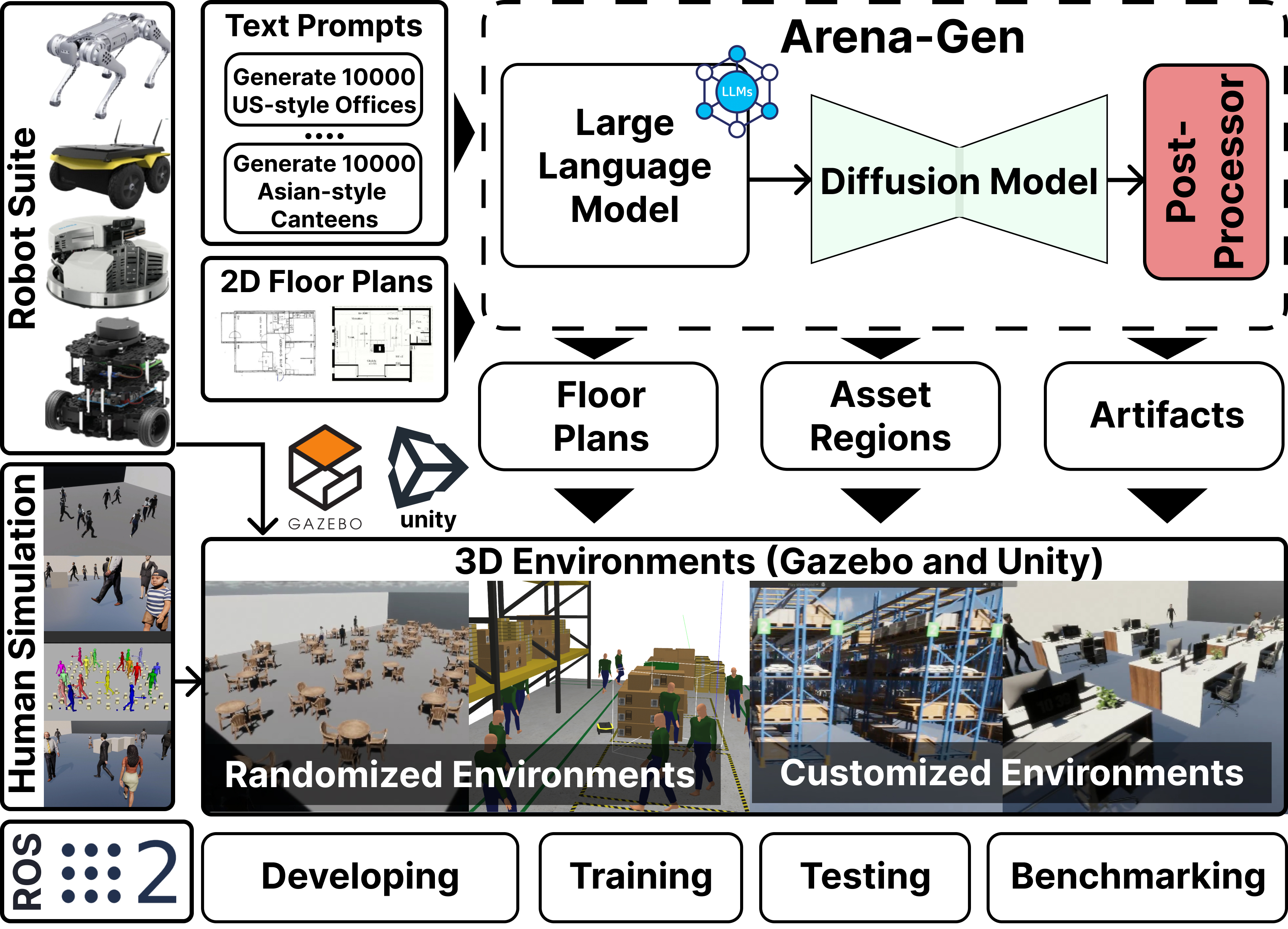
We introduce Arena 5.0, the fifth iteration of the Arena platform, featuring photorealistic simulation via NVIDIA Isaac Gym, comprehensive benchmarking, and customizable scenario generation!