Guided Streaming Stochastic Interpolant Policy
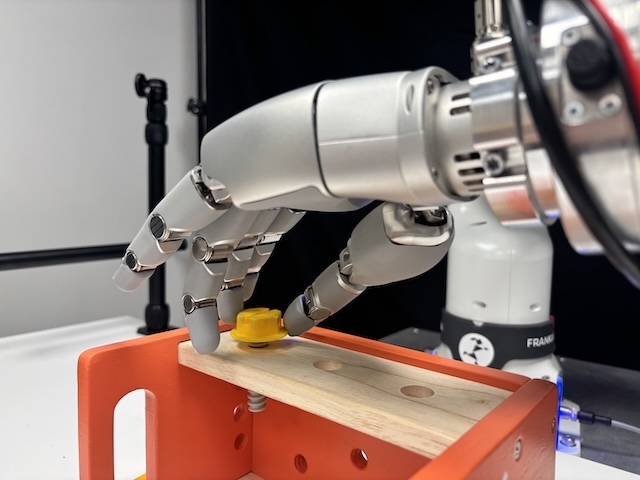
A principled inference-time guidance framework for streaming generative robot policies, enabling fast, reactive obstacle avoidance within the action chunk.

Laruso blog features productivity, tips, inspiration and strategies for massive profits. Find out how to set up a successful blog or how to make yours even better!
A principled inference-time guidance framework for streaming generative robot policies, enabling fast, reactive obstacle avoidance within the action chunk.
A dual-arm manipulation framework that enables skill reuse—recomposing learned single-arm skills into novel left–right pairings to tackle combinatorial diversity.
We introduce a plug-and-play module that corrects off-manifold drift when guiding flow models with multiple rewards at inference time.
A self-supervised tactile backbone that learns shared representations across heterogeneous tactile sensors, boosting perception and contact-rich manipulation—even with sensors unseen during pretraining.
CLeAR took Overall Champion at REAL-I 2026, the 1st Real-World Embodied AI Learning Challenge, held at ICRA 2026.
An open-source framework for evaluating topological mapping, with the first quantitative measure of dataset ambiguity (perceptual aliasing).
We are excited to share that a paper from CLeAR has been accepted to ICML 2026! Here’s a snapshot: Conflict-Aware Additive Guidance for Flow Models under Co...