Arena 3.0 - Advancing Social Navigation in Collaborative and Highly Dynamic Environments
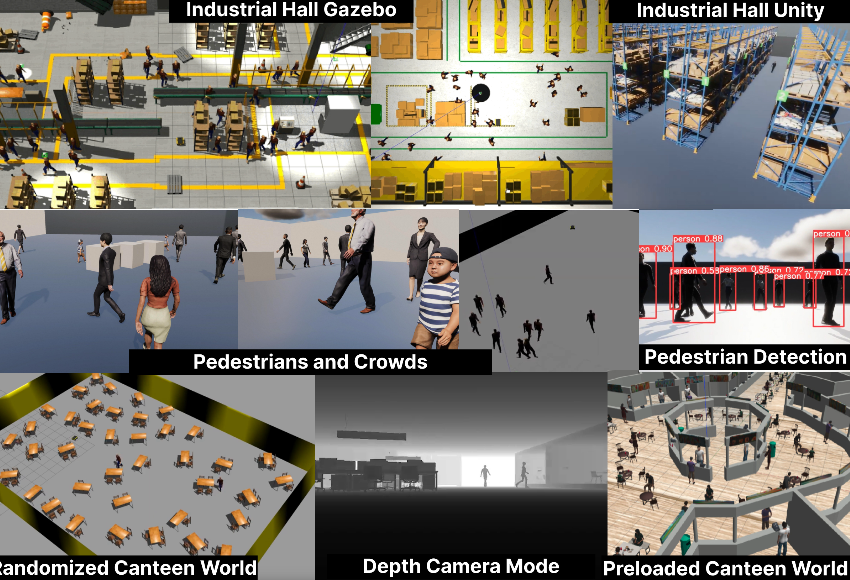
We introduce the third iteration of the Arena platform - Arena 3.0, a platform to develop, train, and benchmark social navigation approaches!

Laruso blog features productivity, tips, inspiration and strategies for massive profits. Find out how to set up a successful blog or how to make yours even better!
We introduce the third iteration of the Arena platform - Arena 3.0, a platform to develop, train, and benchmark social navigation approaches!
We propose an optimization-based grasp synthesis framework, GRaCE, to generate context-specific grasps in complex scenarios. We test GRaCE in a simulator and a real-world grasping tasks.
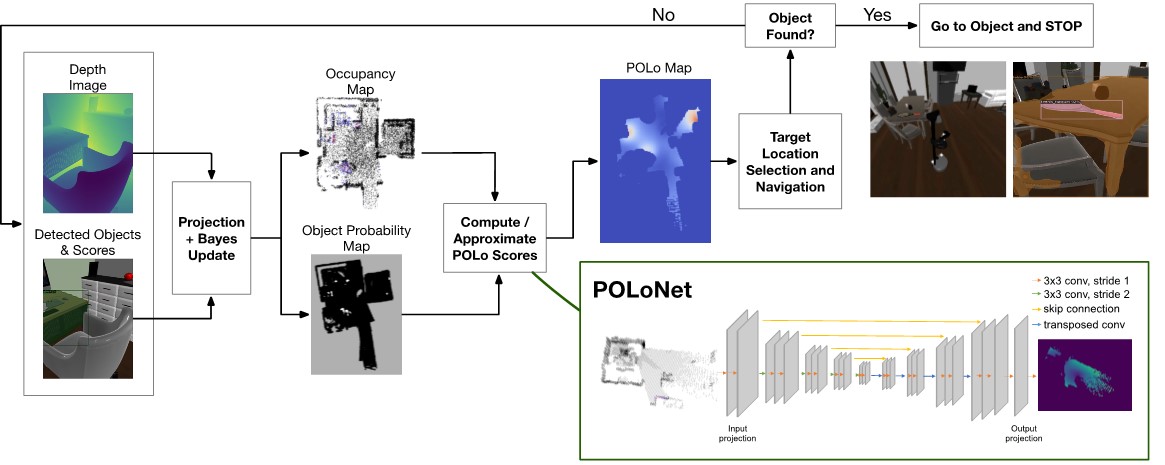
We introduce a novel framework centered around the Probable Object Location (POLo) score, which allows the agent to make data-driven decisions for efficient object search.
We apply techniques from continual learning to the problem of selective forgetting in deep generative models. Our method, dubbed Selective Amnesia, allows users to remap undesired concepts to user-defined ones.
Both our submitted papers were accepted to Neurips this year! Come join us in New Orleans! Congrats to Alvin and Shuyue. Find out more about the papers below...
We study a model of multi-population learning with heterogenous beliefs.
CLeAR had three papers accepted to IROS this year! Come join us in Detroit! Congrats to Tasbolat, Bowen, and Kaiqi. Find out more about the papers below: ...