ICRA'25 Keynote
Harold gave a keynote at ICRA’25 on a foundation model for agents in embodied AI systems. Check it out below or on youtube: https://youtu.be/NCkwz0dBmO4?si=R...

Laruso blog features productivity, tips, inspiration and strategies for massive profits. Find out how to set up a successful blog or how to make yours even better!
Harold gave a keynote at ICRA’25 on a foundation model for agents in embodied AI systems. Check it out below or on youtube: https://youtu.be/NCkwz0dBmO4?si=R...
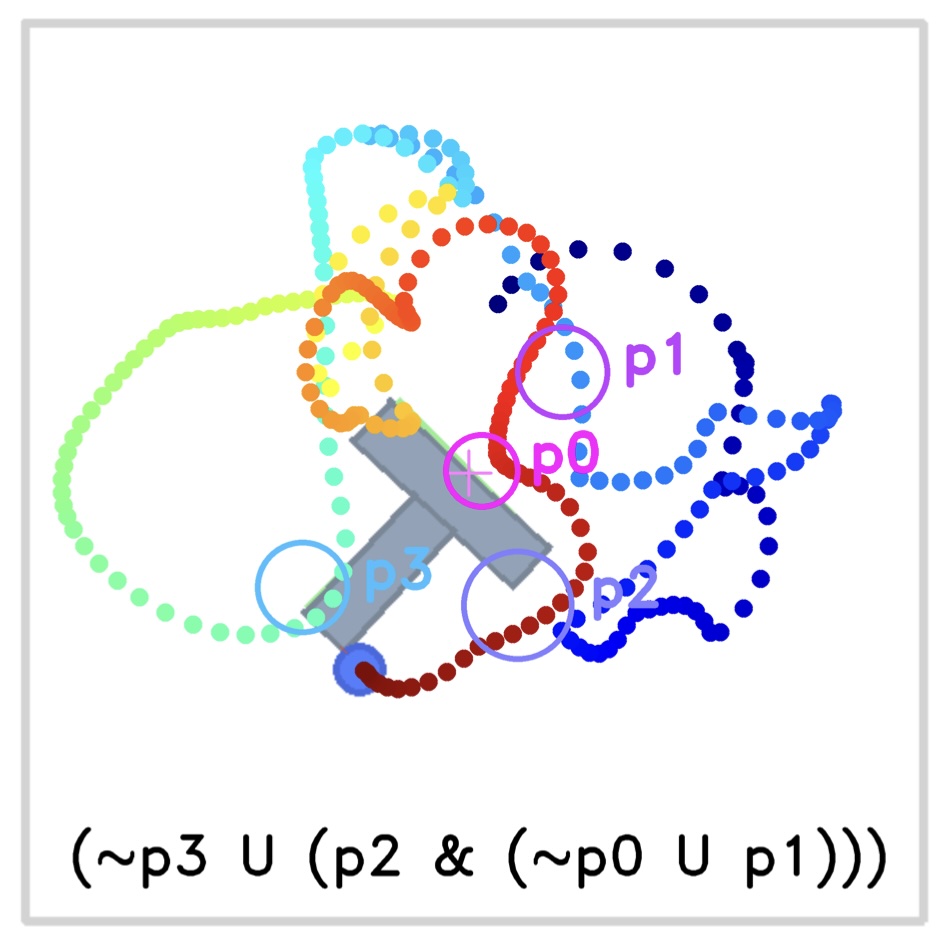
DOPPLER is a new framework that combines diffusion models and hierarchical reinforcement learning to let robots plan and replan complex, long-horizon tasks from offline data with robustness in the real world.
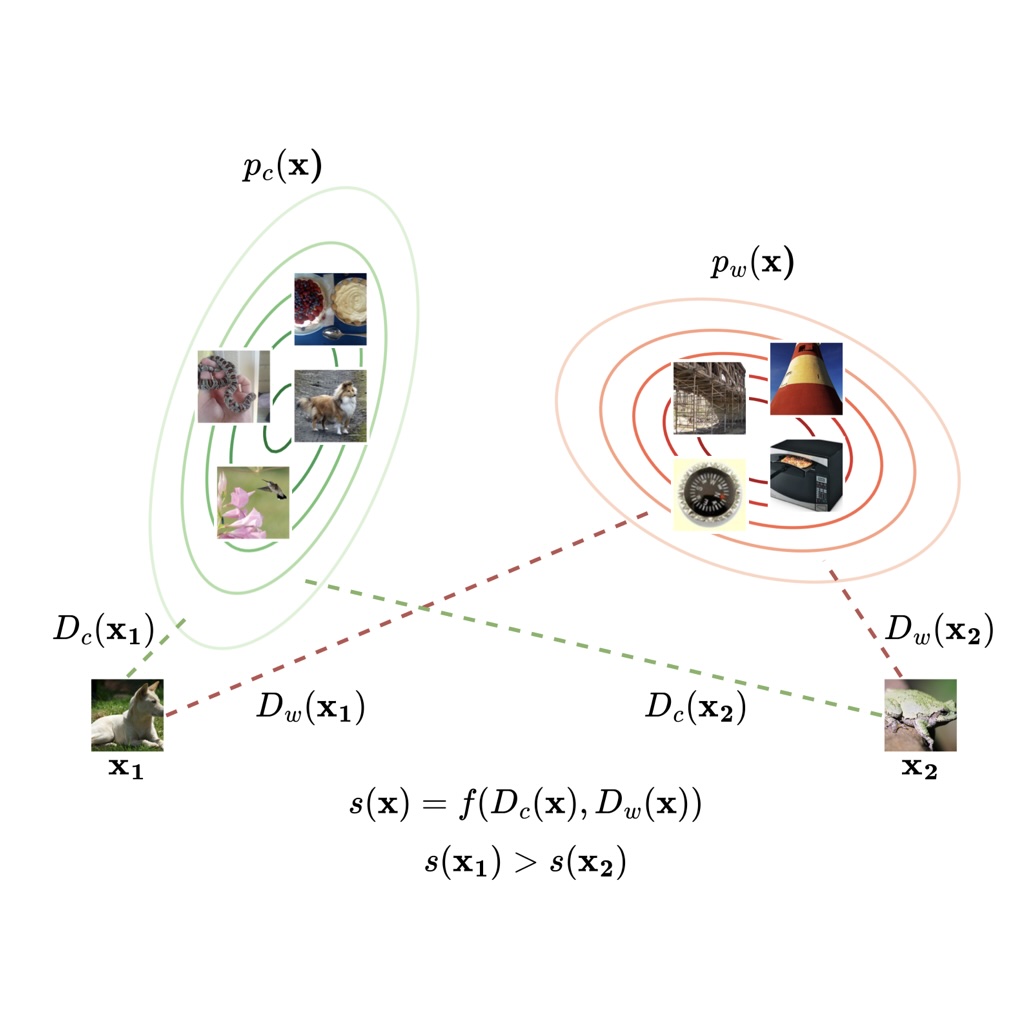
We propose optimal likelihood ratio-based selective classification methods based on the Neyman-Pearson lemma and evaluate them under vision and language covariate shifts tasks.
Kaiqi Chen successfully defended his thesis and is now Dr. Chen. Congratulations Kaiqi!
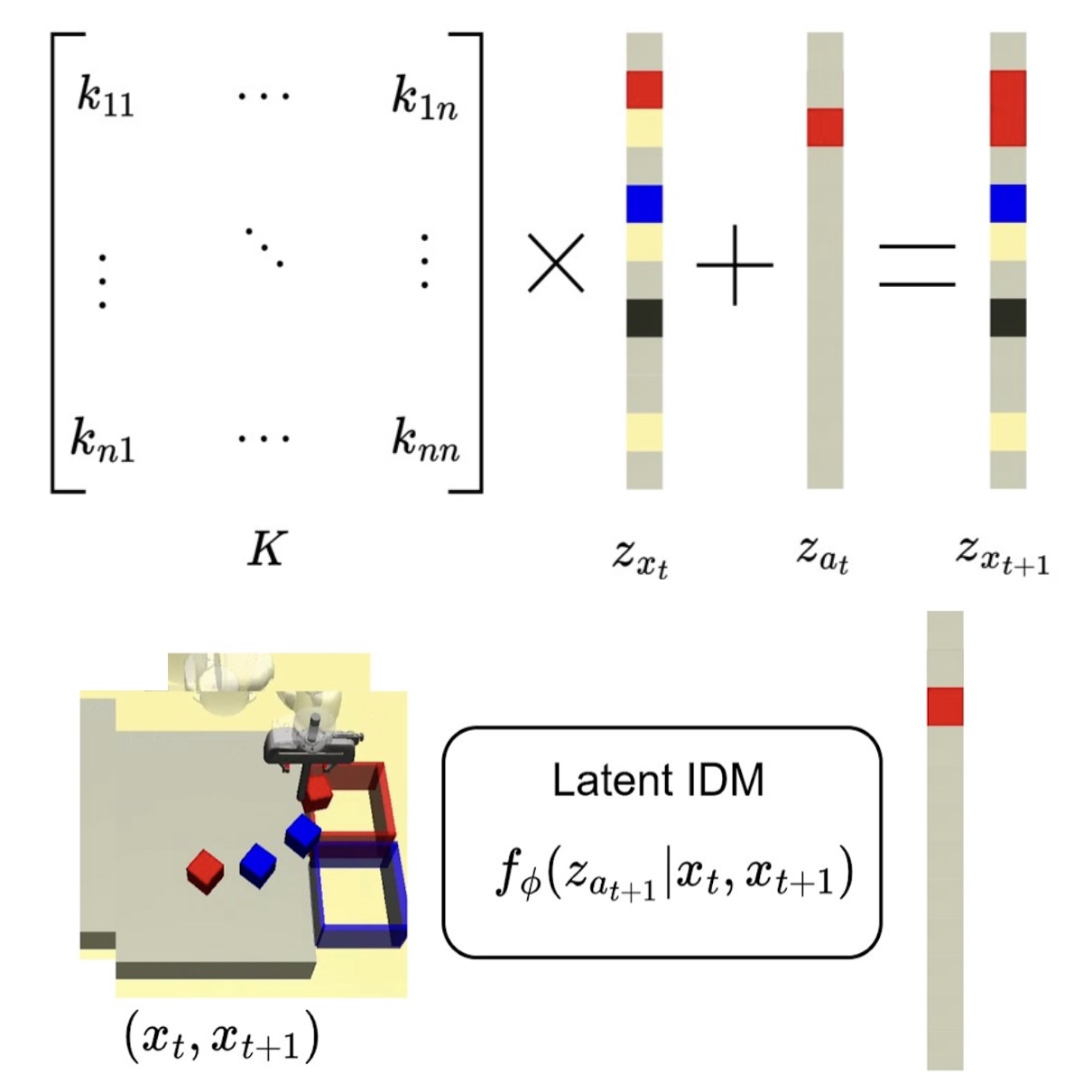
We introduce KOAP for imitation learning with limited actions.
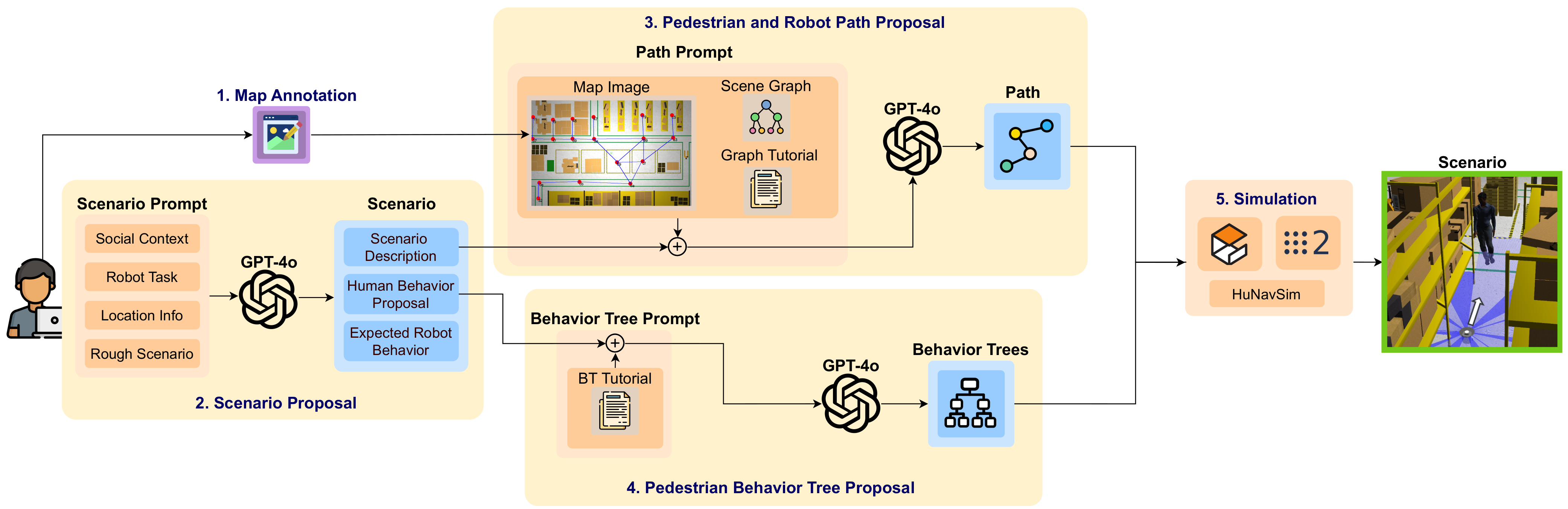
We design an LLM-driven social-scenario simulation pipeline (SocRATES) to enable more holistic evaluation of social navigation algorithms. SocRATES generates context- and location-appropriate scenarios from simple text and image-based inputs, thus reducing the labor-intensive task of scenario proposal and synthesis that is typically required for scenario-based testing.
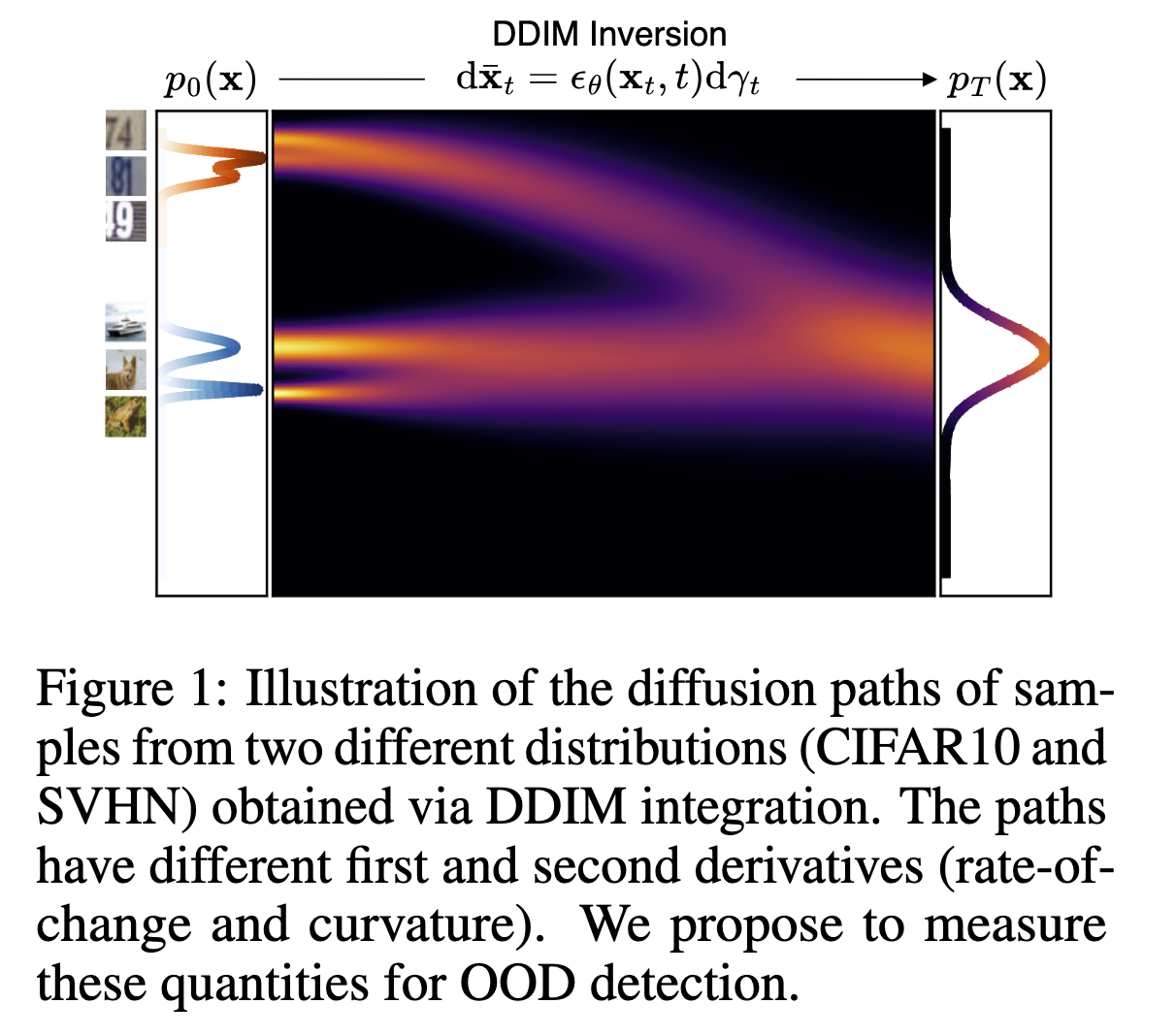
We show that a single unconditional diffusion model performs competitively in out-of-distribution detection tasks by measuring the rate-of-change and curvature of diffusion paths connecting data samples to the standard normal distribution.