The Dynamics of Q-learning in Population Games
We develop an accurate physics-inspired model for describing how a population of Q-learning agents adapt as they interact.

Laruso blog features productivity, tips, inspiration and strategies for massive profits. Find out how to set up a successful blog or how to make yours even better!
We develop an accurate physics-inspired model for describing how a population of Q-learning agents adapt as they interact.
Harold has been awarded the University Annual Teaching Excellence Award (2022). Harold also won the Faculty Teaching Excellence Award and is now on Faculty H...
Inspired by Social Projection Theory, we use the robot's self model to efficiently model humans.
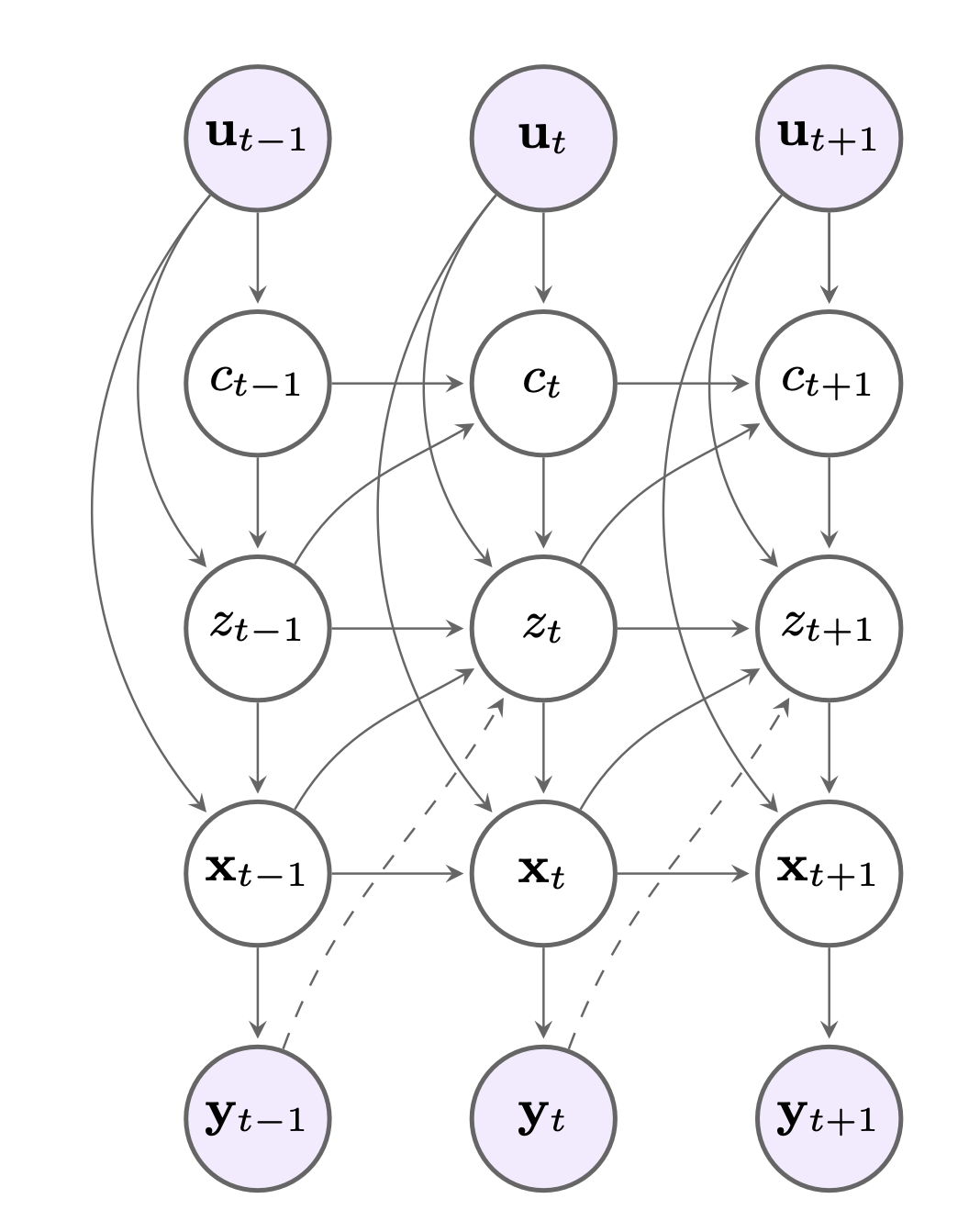
We propose a deep switching state space model that can capture both state-dependent and time-dependent switching patterns in time series data.
Abdul Fatir Ansari successfully defended his thesis and is now Dr. Ansari. Congratulations Fatir!
Sreejith Balakrishnan is awarded the Research Achievement Award for his NeurIPS 2020 paper on efficiently exploring reward functions in Inverse Reinforcement...
We have won the Best Paper Award at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2021 in October. IROS is a premier flagshi...