Out-of-Distribution Detection with a Single Unconditional Diffusion Model
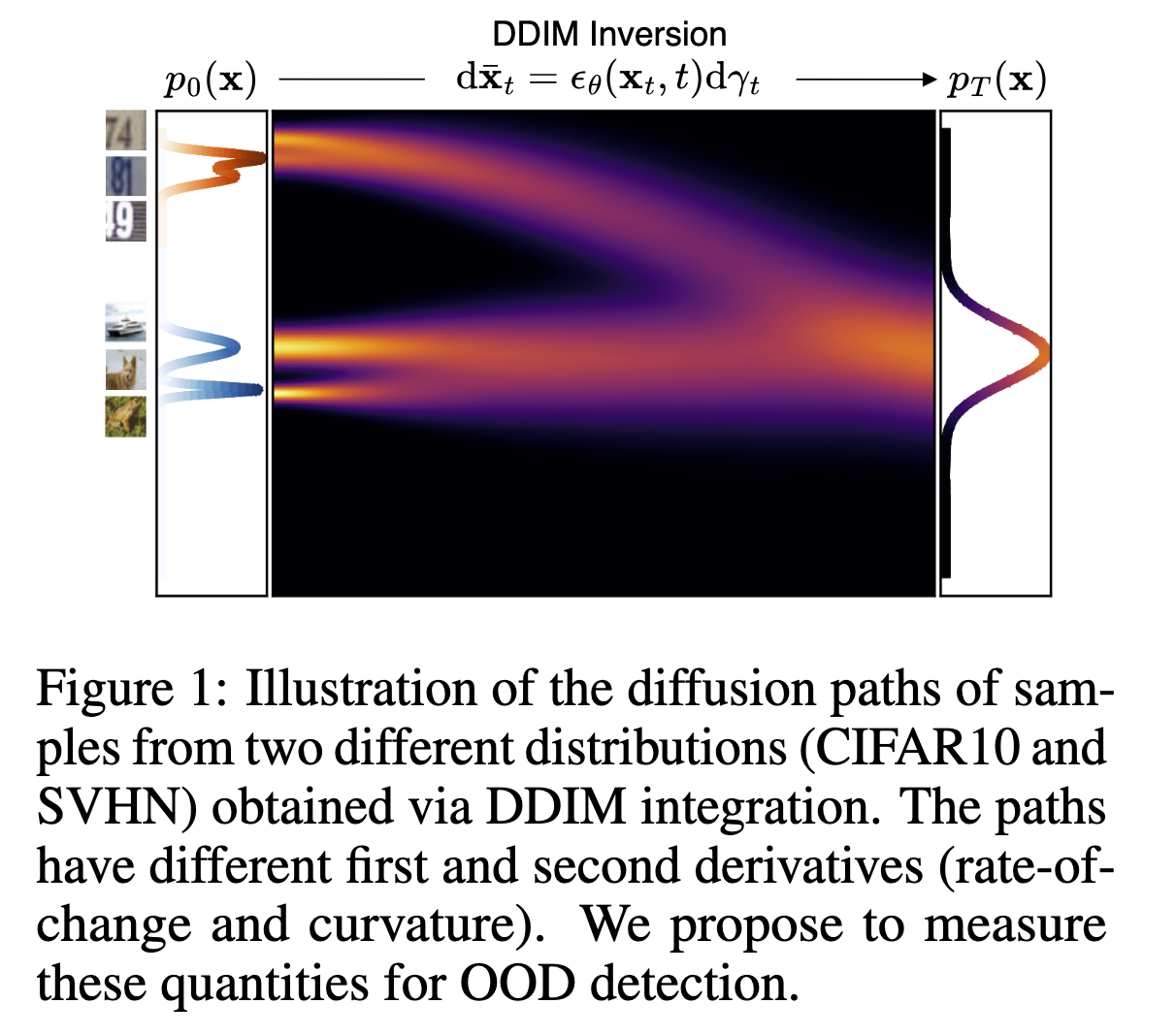
We show that a single unconditional diffusion model performs competitively in out-of-distribution detection tasks by measuring the rate-of-change and curvature of diffusion paths connecting data samples to the standard normal distribution.